

Positioning method and mobile robot based on multiple navigation modules
A mobile robot and navigation module technology, which is applied in satellite radio beacon positioning systems, instruments, electromagnetic wave re-radiation, etc., can solve the problems of low positioning accuracy, insufficient positioning, and affect the smooth progress of navigation, so as to improve navigation stability performance, overcome limitations and system errors, and expand the effect of adapting to the operating environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0048] In the following description, suffixes such as 'module', 'component' or 'unit' used to represent elements are used only to facilitate the description of the present invention, and have no specific meaning per se. Therefore, "module" and "part" can be mixed.
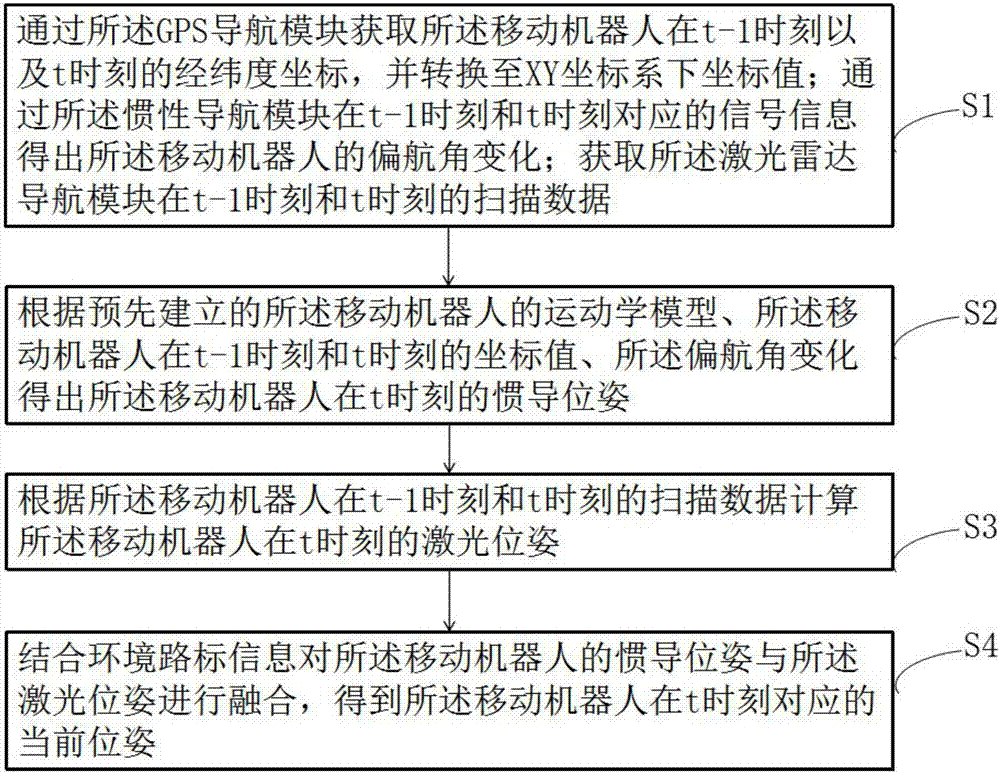
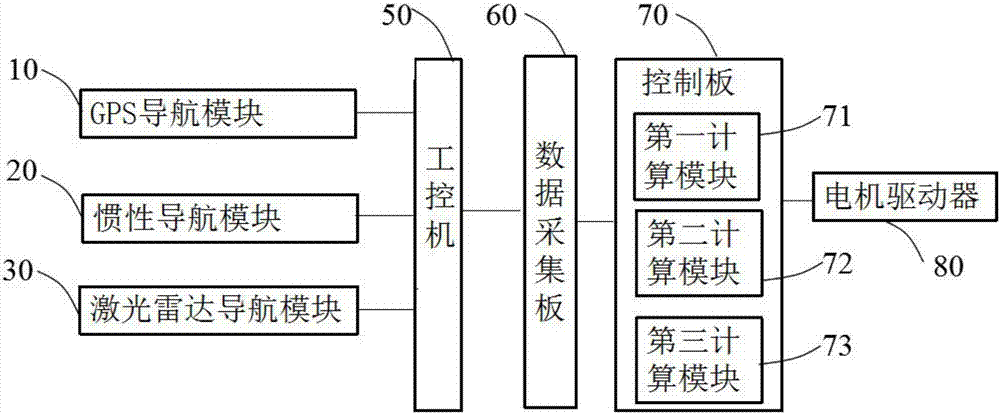
[0049] like figure 1 As shown, the present invention provides a positioning method based on multiple navigation modules, which is applied to a mobile robot. The mobile robot includes a GPS navigation module, an inertial navigation module, and a laser radar navigation module; the method includes the steps:
[0050] S1. Acquire the latitude and longitude coordinates of the mobile robot at time t-1 and time t through the GPS navigation module, and convert them to coordinate values in the XY coordinate system; the inertial navigation module correspond...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More