

Motion coordination control method for space dual-manipulator system
A dual manipulator, motion coordination technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of not taking into account the coordination relationship between the manipulator and the satellite body, and high tracking errors, and achieve high control accuracy and stability. The effect of fast tracking speed and high precision fast tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
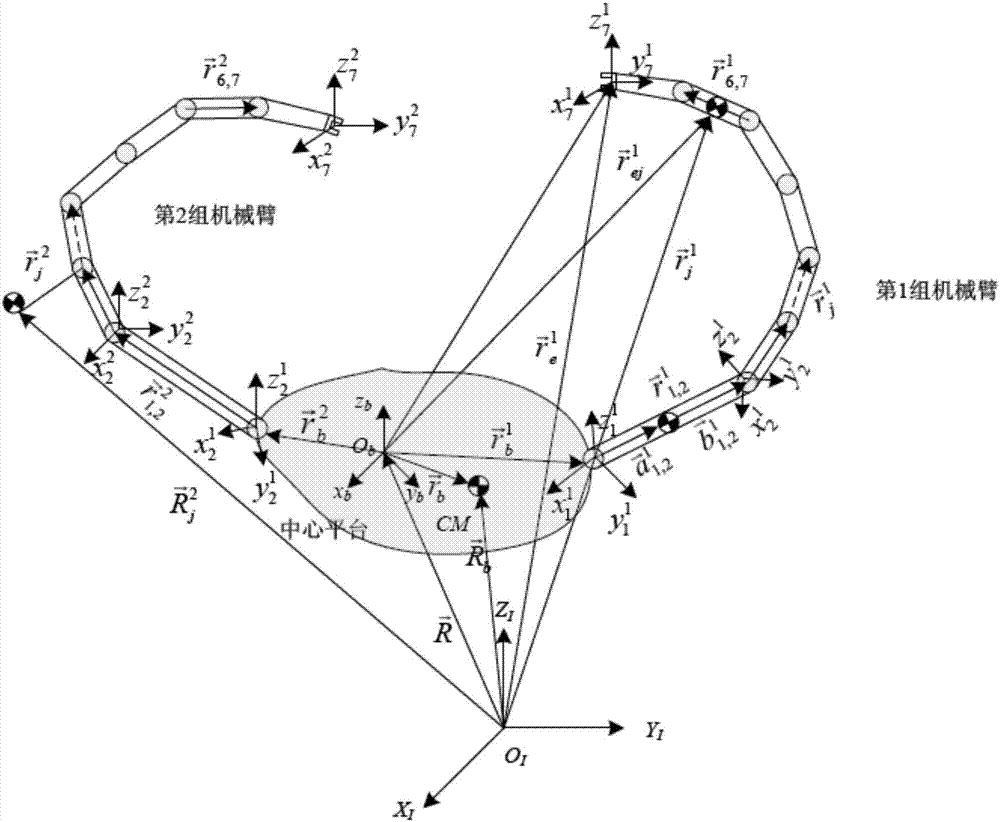
[0148] Embodiment 1: In the weightless space environment, the kinematics and dynamics of the space manipulator are quite different from those of the ground manipulator. Therefore, it is necessary to re-establish the kinematics and dynamics equations of the space manipulator from the principles of mechanics. This patent uses the momentum conservation and Lagrangian equations of the space dual manipulator system to derive the kinematics equation and dynamics equation of the space dual manipulator system in the free flight state. Secondly, the trajectory planning problem of the space manipulator system is studied with the space dual manipulator system grasping a relatively stationary object as the goal. Through the point-to-point trajectory planning of the end of the manipulator, the motion trajectory of the manipulator is approximated by the quintic polynomial, the coefficients of the quintic polynomial are simplified by constraints, and the coefficients are iteratively solved by...
specific Embodiment approach 2
[0364] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is:
[0365] Step one specifically includes:
[0366] Step 11. Establish the kinematic equation of the space dual manipulator system according to the following formula:
[0367]
[0368] in, k represents the kth robotic arm, and k is 1 or 2;
[0369] is the mass of the i-th connecting rod of the k-th robotic arm; k i k means J i k The unit vector of the direction of rotation, J i k is the joint connecting the i-1th link and the i-th link in the kth robotic arm; p i k Indicates the joint J i k The position vector of ; Θ k is the joint angle vector of the kth robotic arm;
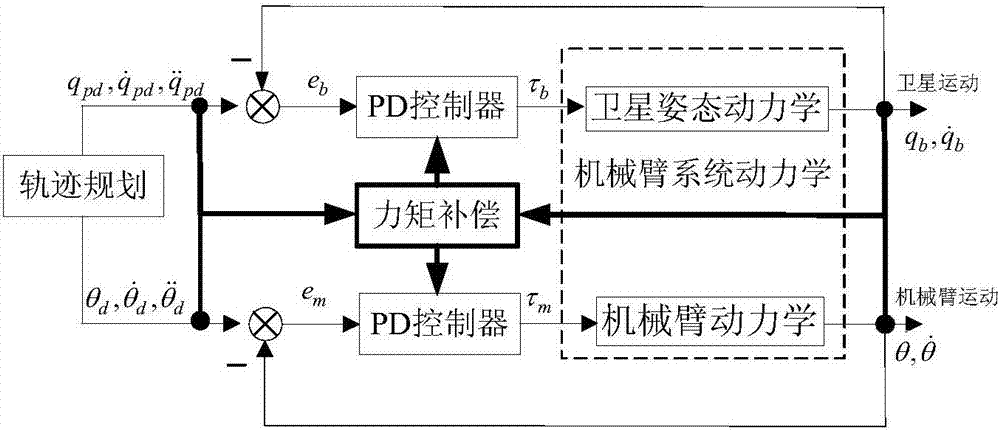
[0370] Step 12. Establish the dynamic equation of the space dual manipulator system according to the following formula:
[0371]
[0372] where M(q) is the generalized inertia tensor of the manipulator, is the nonlinear moment related to the manipulator and t...
specific Embodiment approach 3
[0374] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is:
[0375] Step two specifically includes:
[0376] Step 21. Obtain the initial state of the end of the space manipulator final state and the desired state
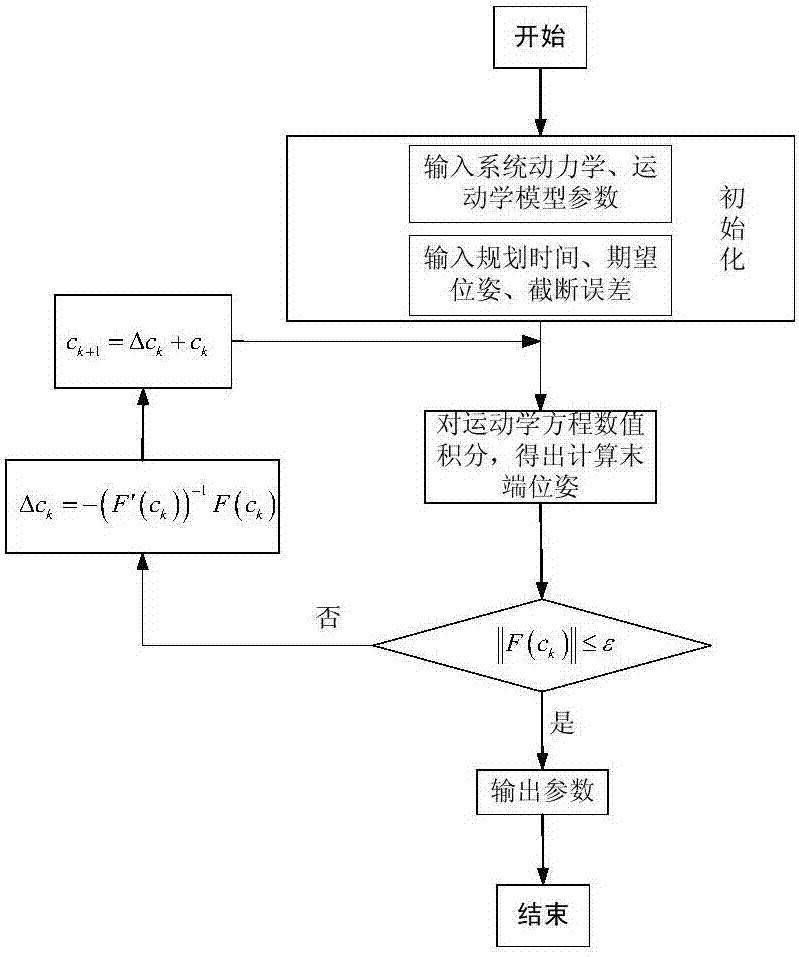
[0377] Step 22. Assume that there exists t such that:
[0378]
[0379]
[0380] in, are the joint angle, angular velocity and angular acceleration of the kth robotic arm, respectively; and respectively The lower and upper limit values of , and respectively the lower and upper limits of the and respectively The lower and upper limit values of ; t 0 is the initial moment of trajectory planning, t f is the terminal moment of trajectory planning;
[0381] The joint function is parameterized using a quintic polynomial as follows:
[0382]
[0383]
[0384] is the parameter to be solved;
[0385] Step two and three, command Find the solution of the system of equation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More