

Equivalent mass determination method of 3-PRS series-parallel mechanism
A technology of equivalent mass and determination method, applied in the field of determination of effective mass, can solve the problem of difficulty in determining equivalent mass, and achieve the effect of easy calculation and application, optimization of structure and control system, and easy realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] In order to make the purpose, technical solution and beneficial effect of the present invention clearer, the present invention will be further described in detail through the implementation modes below.
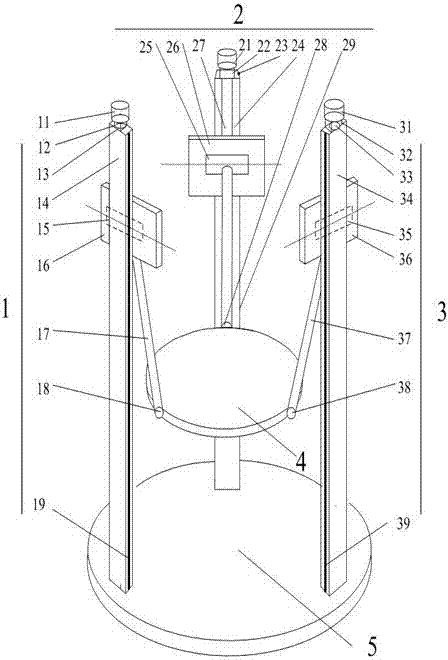
[0038] The structure diagram of 3-PRS series-parallel mechanism is as follows: figure 1 shown. The system consists of a moving platform 4, a fixed platform 5, three servo motors (11, 21, 31), three couplings (12, 22, 32), three ball screws (13, 23, 33), and three columns (14, 24, 34), three cylindrical hinges (15, 25, 35), three sliders (16, 26, 36), three connecting rods (17, 27, 37), three spherical hinges (18, 28, 38), three ranging grating rulers (19, 29, 39). Wherein slide block (16,26,36) slides on the vertical guide rail of column (14,24,34), slide block (16,26,36) and connecting rod (17,27,37) pass cylinder hinge (15 , 25, 35) are connected, and connecting rod (17, 27, 37) is connected with moving platform 4 by spherical hinge (18, 28, 38).
[0039] like ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More