

A topping robot and its realization method
A robot and robot arm technology, applied in the field of agricultural machinery, can solve problems such as damage to crops, missing or over-topping, and difficult topping, so as to achieve the effects of improving yield and quality, reducing damage, and reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
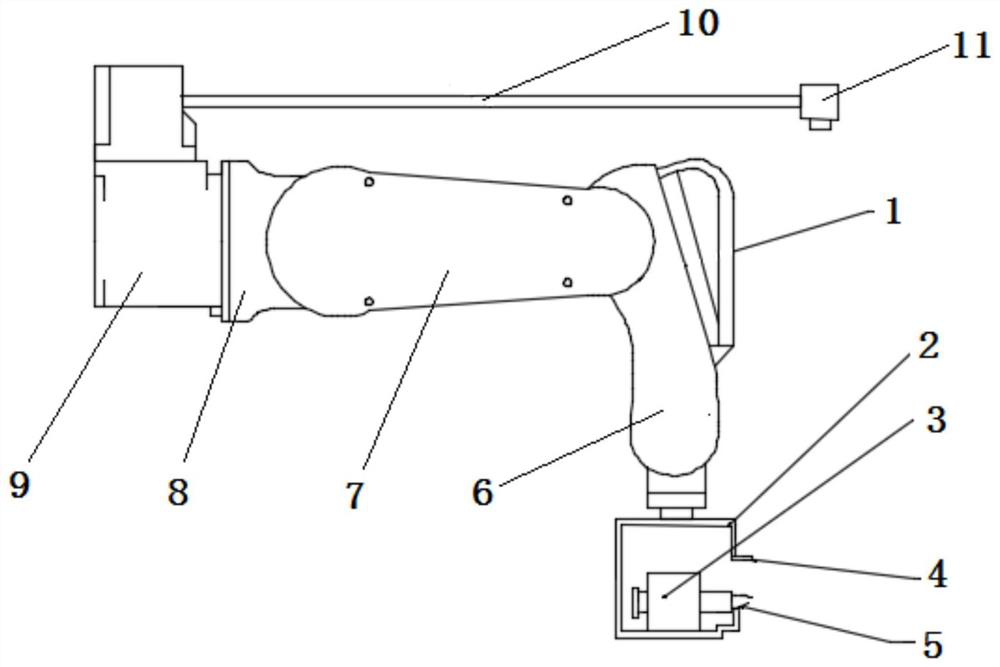
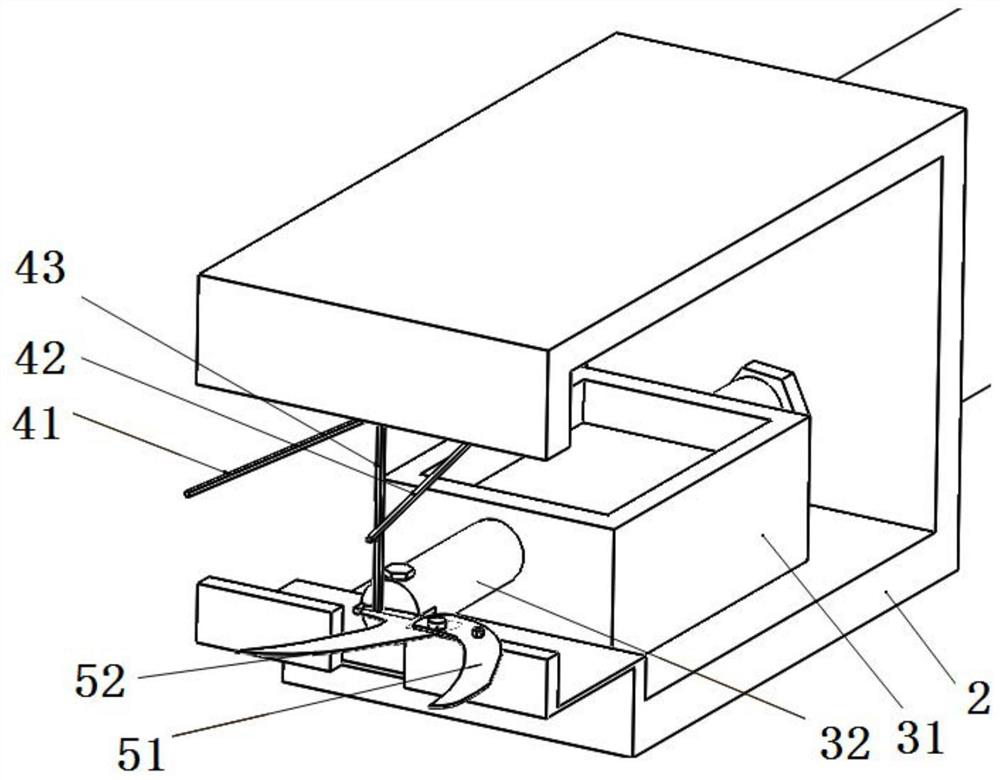
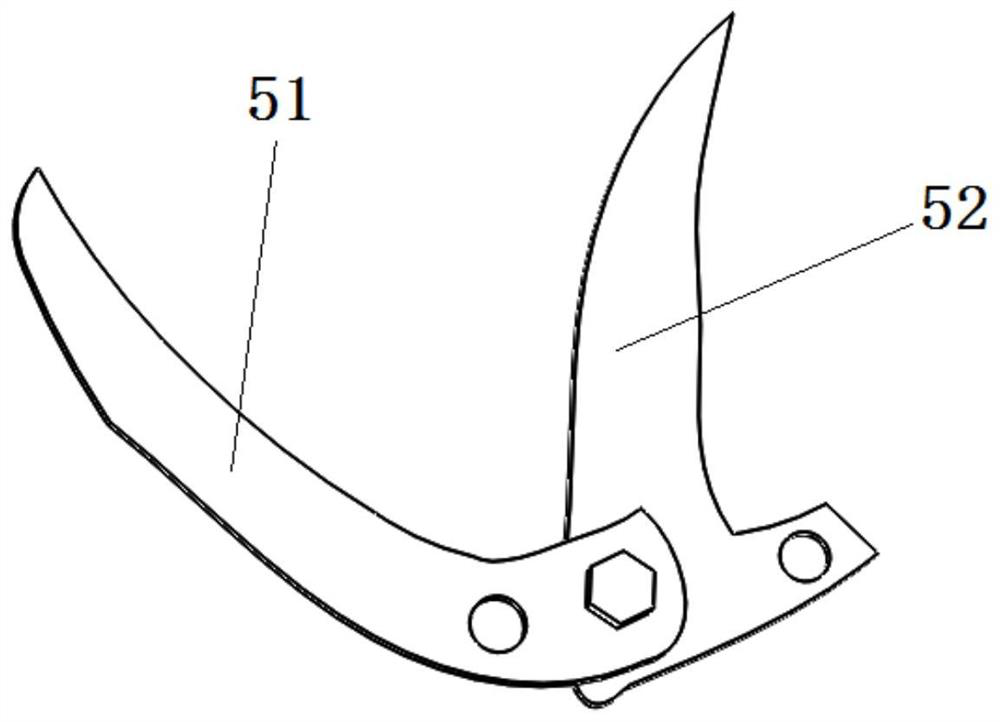
[0030] like Figures 1 to 3 As shown, a topping robot includes a mobile platform, a chassis 9, a waist 8, a connecting rod 10, a visual recognition system 11, a two-joint robot arm 1, a collecting and cutting mechanism 5 and a central processing unit, wherein the chassis 9 is fixed On the mobile platform, specifically, the chassis 9 and the mobile platform are fixed by fastening bolts, the waist 8 is flexibly connected to the chassis 9, and the visual recognition system 11 is connected to the mobile platform through the connecting rod 10. The above-mentioned chassis 9 is connected, and the visual recognition system 11 includes two sets of CCD cameras. Two sets of CCD cameras can be set to obtain images of crop top growth conditions in a manner similar to binocular recogn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More