Three-dimensional point cloud real-time collecting device and robot polishing path planning method
A technology of 3D point cloud and real-time acquisition, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inconsistent accuracy, waste and defective products, and workpiece clamping errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
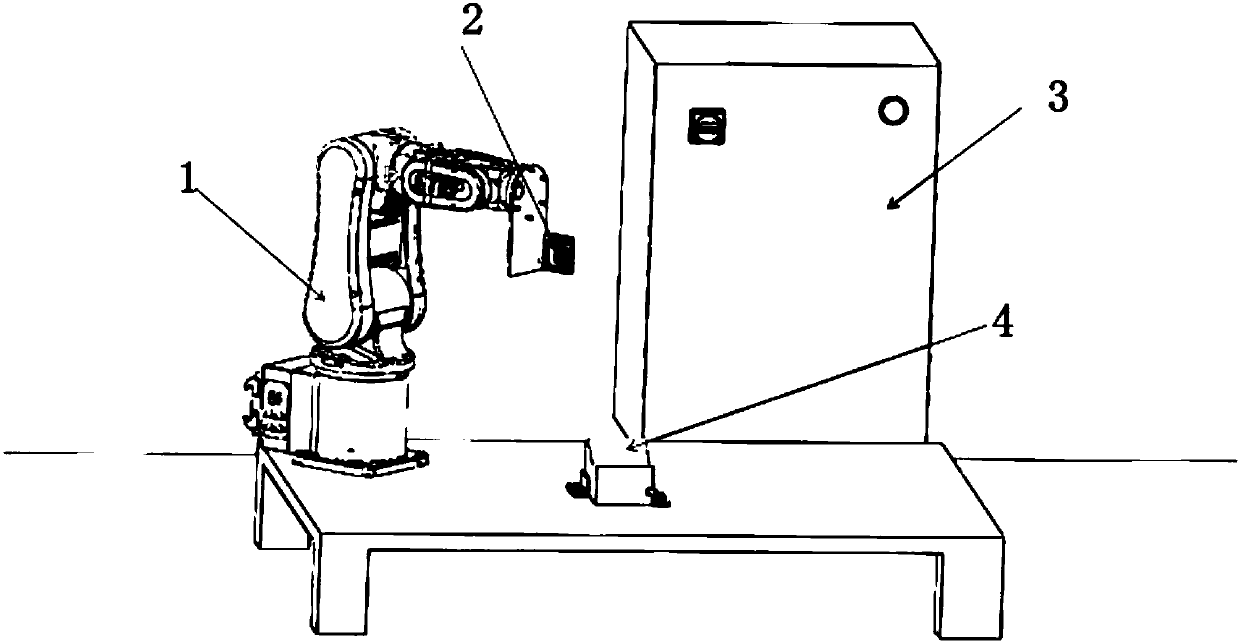
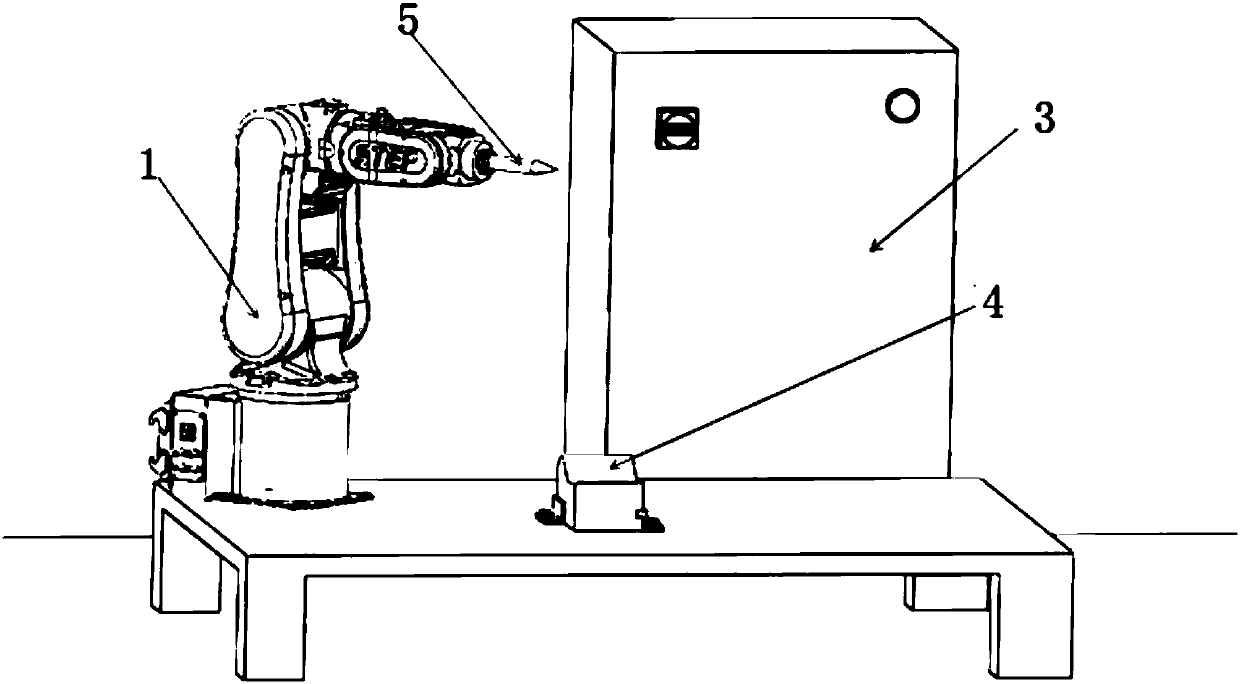
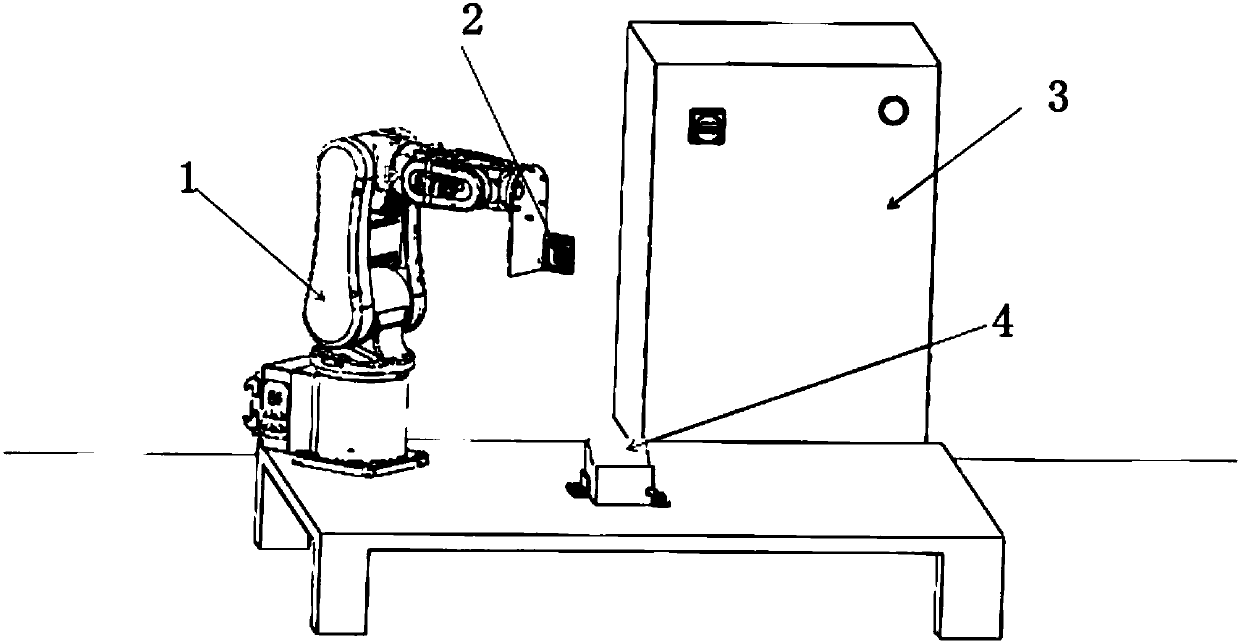
[0080] Such as figure 1 As shown, a real-time acquisition device of a three-dimensional point cloud includes a robot 1, a laser displacement sensor 2, a robot real-time control system 3 based on a real-time operating system, and the laser displacement sensor 2 is arranged at the end of the robot 1 through a clamp. The robot 1 is a six-degree-of-freedom articulated robot, and the robot real-time control system 3 connects the robot 1 and the laser displacement sensor 2 through a real-time industrial Ethernet bus to synchronize the readings of the laser displacement sensor 2 and the pose of the robot 1 , extending the one-dimensional measurement to three-dimensional measurement, so as to obtain the three-dimensional point cloud of the workpiece 4 through scanning.
[0081] The real-time control system of the robot communicates with the robot 1 and the laser displacement sensor 2 at the millisecond level.
[0082] During laser scanning, the movement of the six-axis vertical robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More