

Inverter active damping control method based on full-state feedback
A technology of damping control and state feedback, applied in the direction of converting irreversible DC power input to AC power output, output power conversion devices, electrical components, etc., to achieve the effect of simple algorithm, simple and practical design process, and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
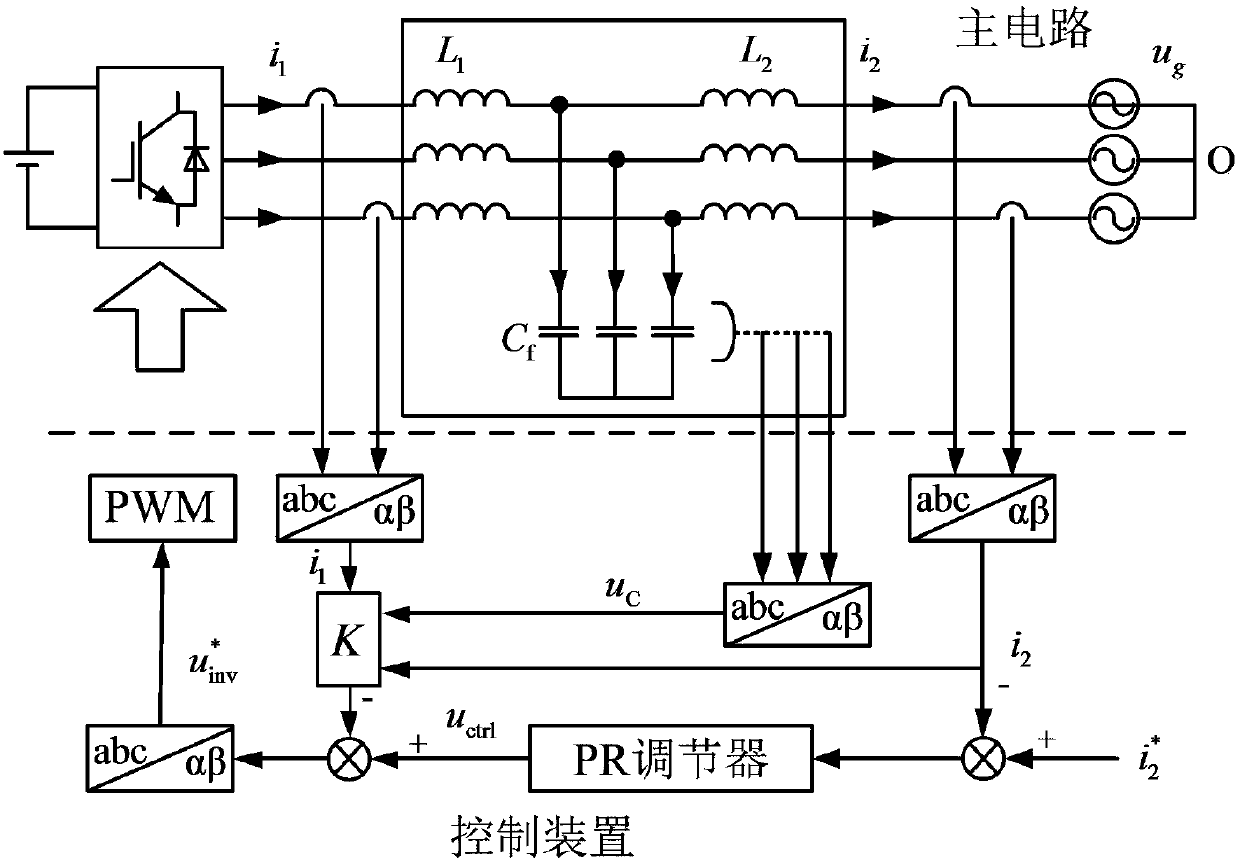
[0022] Specific implementation mode one: as figure 1 As shown, an inverter active damping control method based on full state feedback:
[0023] Step 1: In each sampling period, the bridge arm current i 1 , Inverter grid-connected current i 2 and filter capacitor voltage u c Perform asymmetric regular sampling;
[0024] Step 2: Grid-connected current given value and the feedback value i 2 Subtraction, the obtained current error value passes through the proportional-resonant regulator, and outputs the control signal u of the grid-connected current regulator ctrl ;
[0025] Step 3: The state quantity bridge arm current i 1 , filter capacitor voltage u c and grid current i 2 Respectively and the state feedback coefficient k 1 , k 2 , k 3 multiplied to get the full state feedback signal u feed ;
[0026] Step 4: Connect the output control signal u of the grid-connected current regulator ctrl and full state feedback signal u feed subtraction, plus the feed-forward s...
specific Embodiment approach 2
[0028] Specific embodiment 2: This embodiment is a further description of specific embodiment 1. In the step 3, the state feedback coefficient k 1 , k 2 , k 3 The value of is:
[0029] For the state-space model of the LCL filter ∑ 0
[0030]
[0031] In the formula, x——state variable matrix;
[0032] y——output variable matrix;
[0033] u——input variable matrix;
[0034] —state variable derivative matrix;
[0035] A - state matrix;
[0036] b - input matrix;
[0037] c - output matrix.
[0038] Through the state feedback matrix K, we have
[0039] det[λI-(A-bK)]=f * (λ)
[0040] In the formula, det——calculate matrix determinant;
[0041] λ—the eigenvalue of the system matrix;
[0042] K——state feedback matrix;
[0043] I——identity matrix;
[0044] A - state matrix;
[0045] b - input matrix;
[0046] f * (λ)——characteristic polynomial of system expectation matrix;
[0047]
[0048] where f * (λ)——characteristic polynomial of system expectation matri...
Embodiment 1
[0093] This embodiment discloses an active damping control method for an inverter with full state feedback, which belongs to an improved control method for grid-connected current closed-loop control of an inverter. This control method does not need to adjust the control parameters of the LCL filter and the grid-connected inverter current loop, but only needs to increase the control parameters of the active damping link of the state feedback channel.
[0094] The active damping control method of the inverter based on full state feedback of the present invention is as follows:
[0095] like figure 1 As shown, the LCL grid-connected inverter includes two parts, the main circuit and the control device. The part below the dotted line is the full-state feedback active damping control and current closed-loop control device applied to the LCL grid-connected inverter of the present invention.
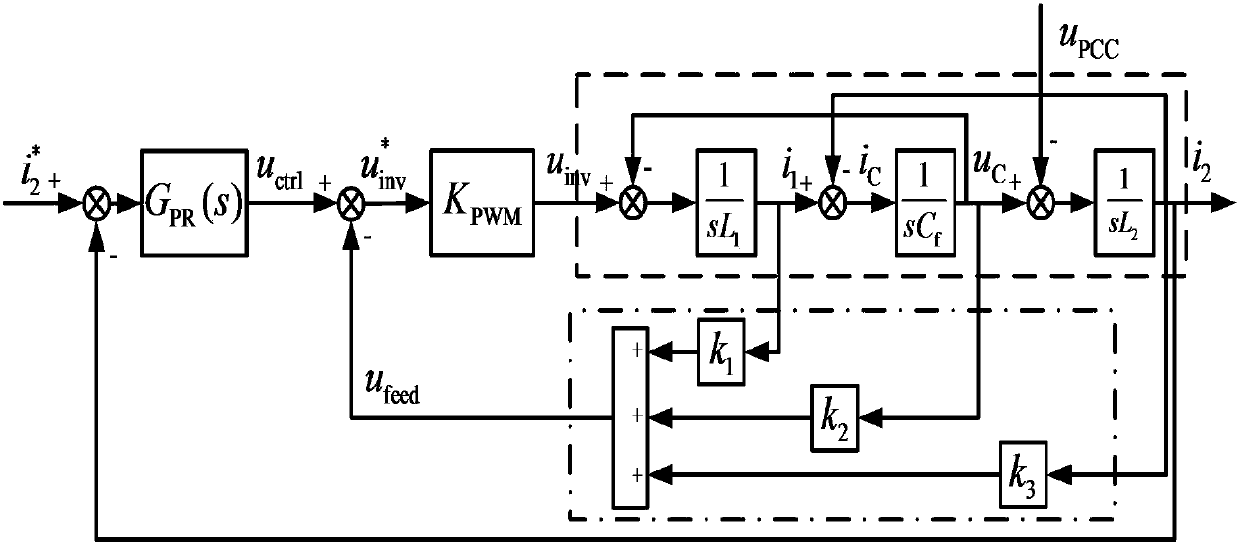
[0096] figure 2 It is a control block diagram of an inverter active damping control metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More