

An industrial robot vision system and teaching method thereof
An industrial robot and vision system technology, applied in the field of automation control, can solve problems such as user programming and system complexity, and achieve the effects of small amount of calculation, reduced system complexity, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
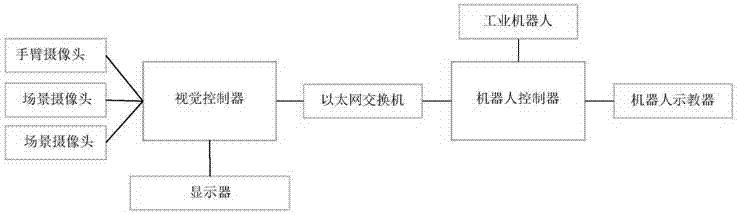
[0028] see figure 1 , an industrial robot vision system, including a camera, a vision controller, an Ethernet switch, a robot controller, and a robot teaching device; wherein, there are multiple cameras, which are set at any fixed position in the work scene or / placed on the robot arm The end moves with the robotic arm, the vision controller and the robot controller communicate through the Gigabit Ethernet network through the Ethernet switch, and the robot controller is connected to the robot teach pendant.
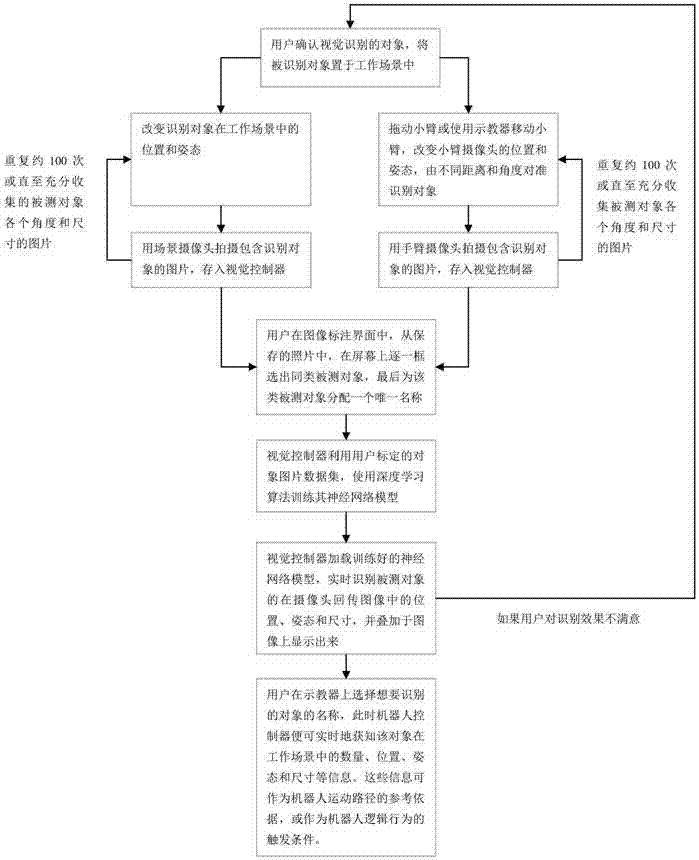
[0029] The working principle of the industrial robot vision system of the present invention is as follows: the picture of the object is recognized by the camera and stored in the vision controller, and the vision controller uses the object picture data set calibrated by the user to train its neural network model using a deep learn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More