Under-actuation unmanned light boat track tracking control method of ICA-CMAC neural network based on RBF identification
A neural network and track tracking technology, applied in the field of underactuated unmanned vehicle track tracking control, can solve the problems of poor robustness and adaptability of traditional control algorithms, difficulty in establishing USV models, complex dynamic characteristics of the system, etc., to achieve Improve the learning speed and track tracking accuracy, enhance the adaptive adjustment ability and anti-interference ability, and reduce the effect of dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0033] Step 1. Obtain the position and attitude parameters of the USV
[0034] The position information of the USV is measured by the position reference system, and the heading attitude information of the USV is measured by the attitude reference system; the acquired USV attitude and position signals are filtered and space-time aligned to obtain the current precise position and attitude of the USV.
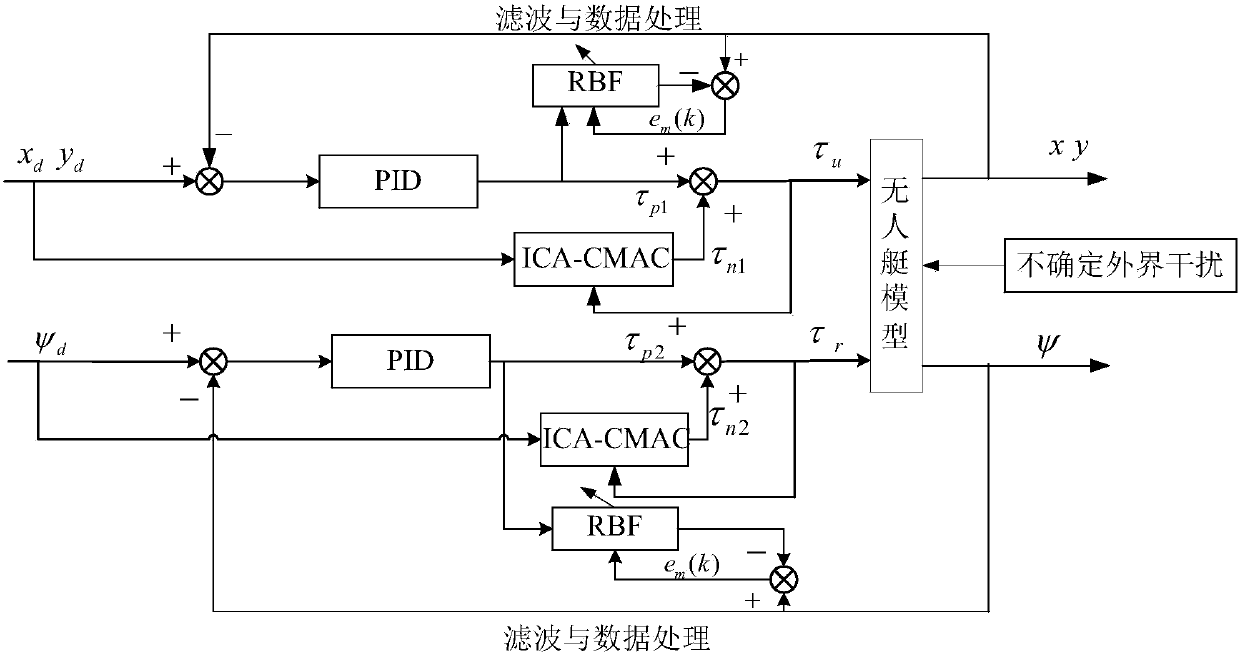
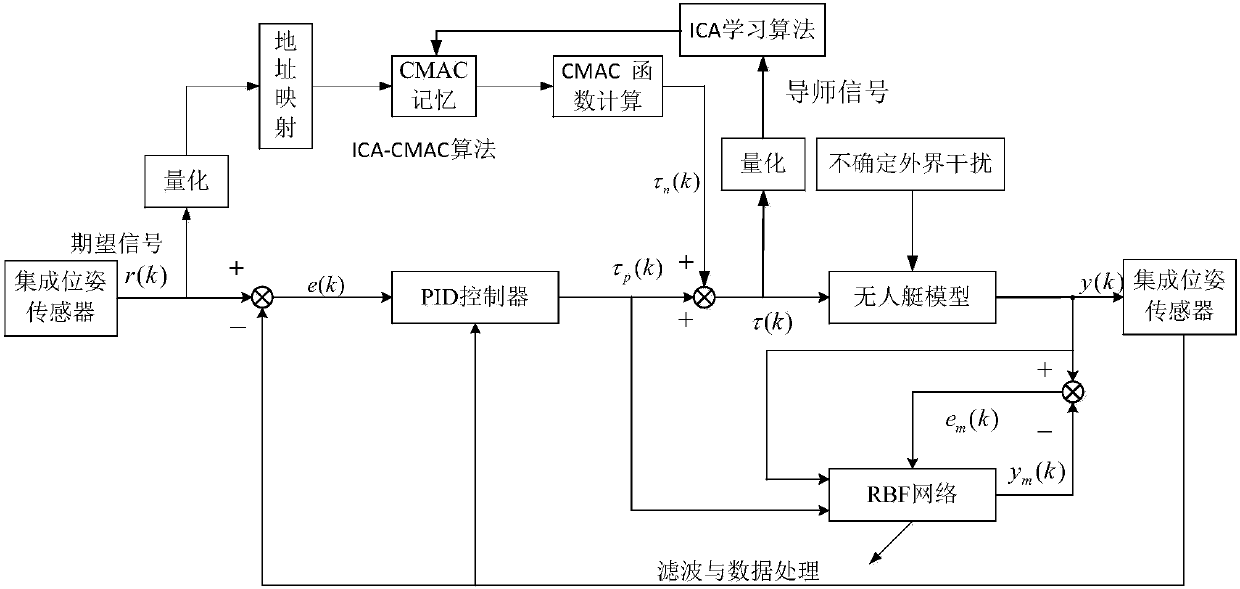
[0035] Step 2. Adaptive integral separation PID control using RBF identification
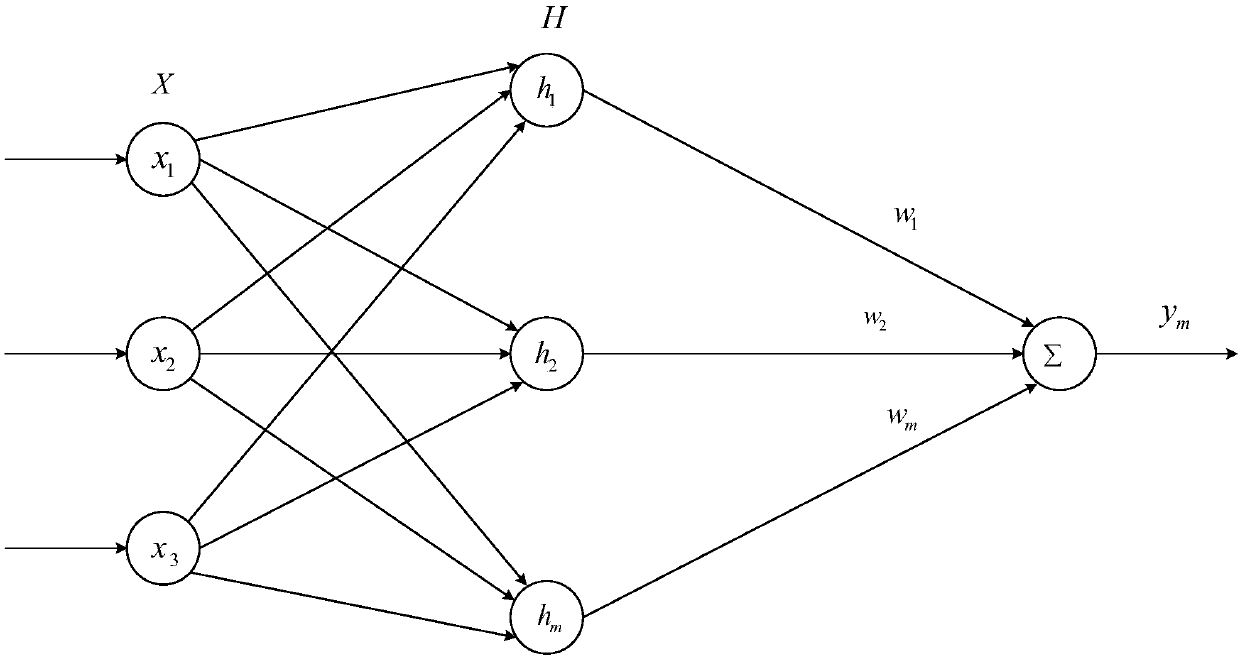
[0036] The RBF neural network is used to approach the controlled object, obtain the Jacobian identification information of the USV output to the input, and perform online adjustment of the PID control parameters. The output of the controller after parameter adjustment becomes the input of the controlled object. The performance index function of the RBF adjustment is The square of the difference between the identified output and the actual output.
[0037] Step 3. Parallel control of ICA-CMAC neural...
specific Embodiment approach 2
[0044] Embodiment 2. This embodiment is a further description of the underactuated USV track tracking control method based on the ICA-CMAC neural network of RBF identification described in Embodiment 1.
[0045] The position reference system and attitude reference system described in step 1 collect data information from the integrated position and attitude sensor, and use Kalman filtering or unscented information filtering to filter out the outliers and high-frequency noise in the signal, and the obtained USV attitude And the position signal is aligned in time by curve fitting, and the data in different coordinate systems are aligned in space to obtain the precise position and attitude of the current USV.
specific Embodiment approach 3
[0046] Specific Embodiment 3. This embodiment is a further description of an underactuated USV track tracking control method based on the ICA-CMAC neural network of RBF identification described in Embodiments 1 to 2.
[0047] The establishment of the error equation in the USV hull coordinate system includes:
[0048]
[0049]
[0050]
[0051]
[0052]
[0053]
[0054] where, η = [x, y, ψ] T , υ=[u, ν, r] T , τ=[τ u ,0,τ r ] T Respectively represent the position, velocity and propulsion force in the northeast coordinate system, x, y, ψ represent the north position, east position and heading angle, respectively, u, ν, r represent the longitudinal velocity, lateral velocity and yaw angular velocity, respectively, τ u , τ r represent the longitudinal force and bow turning moment, respectively, represents its first derivative, d 11 =-X u -X u|u| |u|, d 22 =-Y ν -Y ν|ν| |ν|, d 33 =-N r -N r|r| | r |; Y ν , X u , N r , X u|u| , Y ν|ν| ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com