

V-Rep-based robot virtual teaching demonstration system
A robot and teaching technology, applied in the direction of instruments, teaching models, educational tools, etc., can solve the problems of not fully meeting the customer's automation line control requirements, robot programming language differences, and inconvenient development of autonomous systems, etc., to achieve good experience and interaction The effect of sexiness and large operating space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach
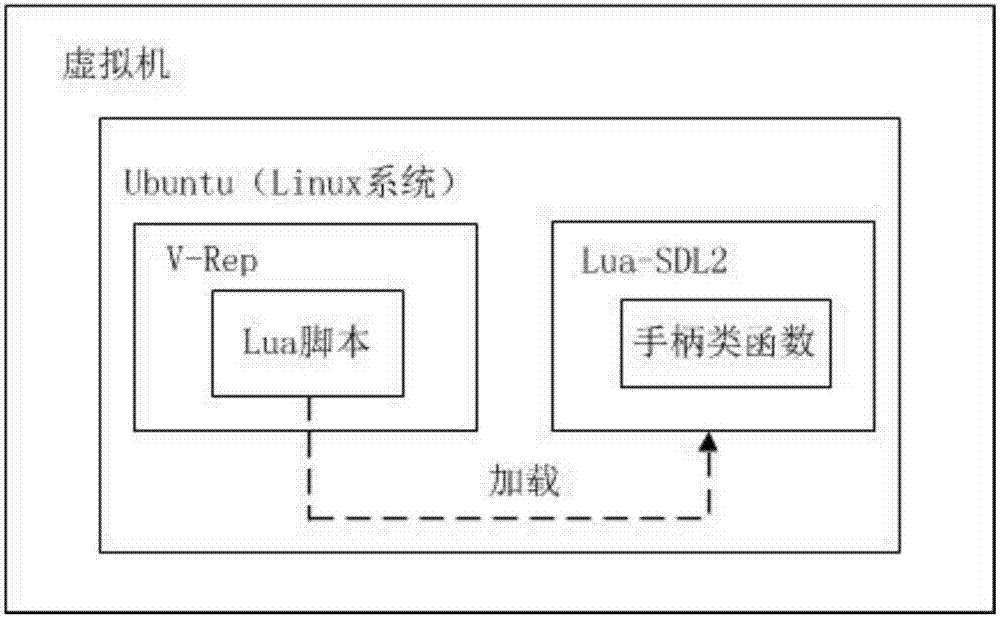
[0027] As a kind of preferred embodiment of the present invention: the step of inputting the positional coordinates of robot teaching key point is: in the Lua script of the scene file that V-Rep opens, load Lua-SDL2 storehouse and call the relevant function in the storehouse, Manually manipulate the 3D mouse to make the end of the visible robot in the virtual scene move to the specified pose according to the movement of the human hand. The specific implementation method is: after manipulating the three-dimensional mouse to obtain the movement and rotation of each axis of the robot, the method of accumulating the amounts of each axis is used, and the pose of the end of the virtual robot is set according to the final accumulation result, so as to realize human-hand alignment. The continuous control of the end pose of the visible robot makes the end of the visible robot move to the specified pose according to the translation or rotation of the human hand.
[0028] Of course, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More