

Dual Kalman filter navigation device and method based on mems sensor and vlc positioning fusion
A Kalman filter and navigation method technology, applied in the field of dual Kalman filter navigation devices, can solve the problems of attitude and position influence, complex positioning algorithm, discontinuous VLC positioning results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
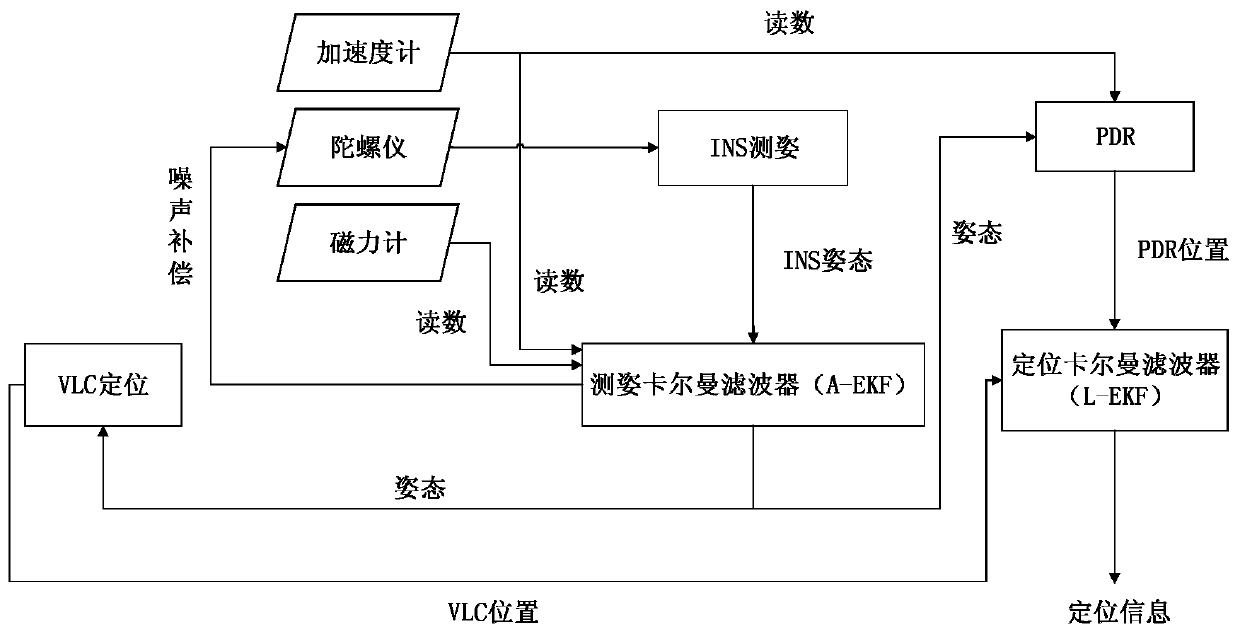
[0115] Such as figure 1 As shown, the double Kalman filter navigation device based on MEMS sensor and VLC positioning fusion is characterized in that it includes MEMS sensor, inertial navigation system (Inertial Navigation System, INS) module, pedestrian dead reckoning (Pedestrian Dead Reckoning, PDR) positioning module, visible light communication (Visible Light Communication, VLC) positioning module, attitude measurement extended Kalman filter (Attitude Extended Kalman Filter, A-EKF) and positioning extended Kalman filter (Location Extended Kalman Filter, L-EKF); MEMS sensors include accelerometers, gyroscopes, and magnetometers.
[0116]The angular velocity information of the receiver in the XYZ direction measured by the gyroscope is transmitted to the INS module, and the data is processed through the gyroscope mechanical arrangement al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More