A tracking target selection synchronization method for patrol drones
A technology for tracking targets and unmanned aerial vehicles, which is applied in the field of tracking target selection and synchronization devices for patrolling drones. It can solve the problems of not being able to obtain target information for ground operators, not being able to inform the exact position of patrolling drones, and real-time video images being out of sync. and other problems, to achieve the effect of eliminating image transmission delay, low investment cost and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
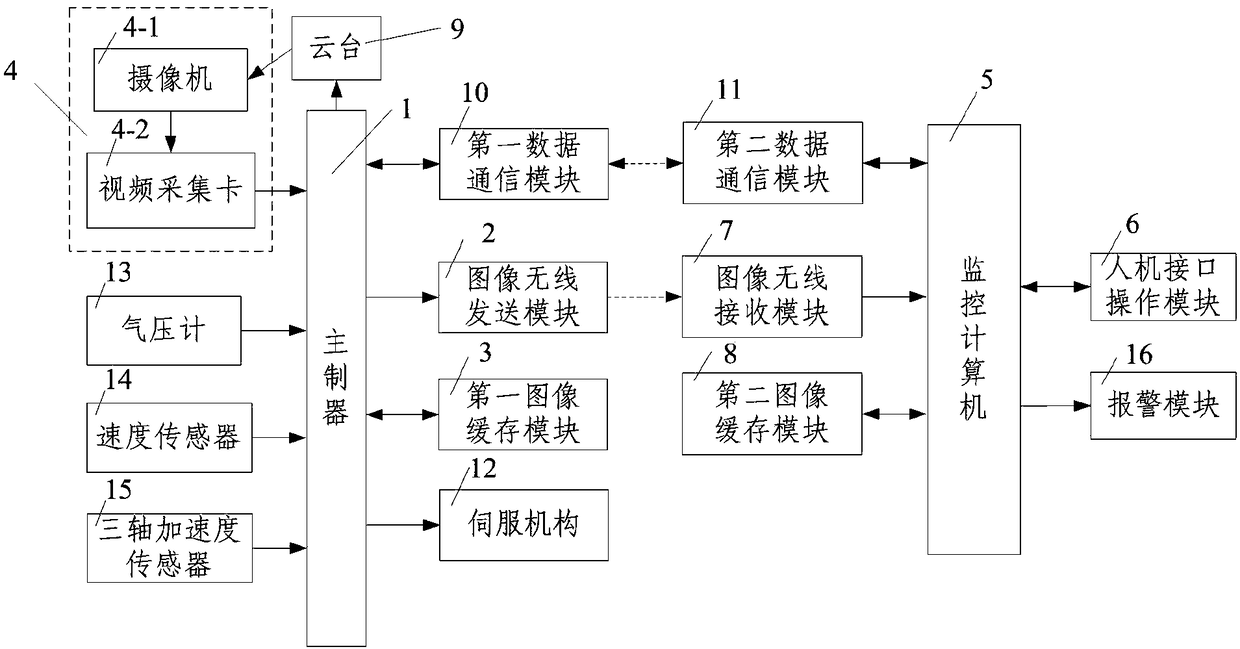
[0043] Such as figure 1 The device for selecting and synchronizing the tracking target of the cruise drone shown includes an airborne tracking platform set on the cruise drone and a monitoring terminal set on a ground station and performing wireless data communication with the airborne tracking platform, The airborne tracking platform includes a main controller 1 and an image wireless sending module 2, a first data communication module 10, and a first image buffer module 3 connected to the main controller 1. The input terminal of the main controller 1 is connected to There is a video acquisition module 4, the monitoring terminal includes a monitoring computer 5 and a human-machine interface operation module 6 connected to the monitoring computer 5, an image wireless receiving module 7, a second data communication module 11, and a second image buffer module 8. The main controller 1 performs wireless video image transmission with the monitoring computer 5 through the image wireles...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com