Identification and compensation method of industrial robot structure parameter bias
A technology of industrial robots and structural parameters, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as DH parameter errors, and achieve the effect of high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
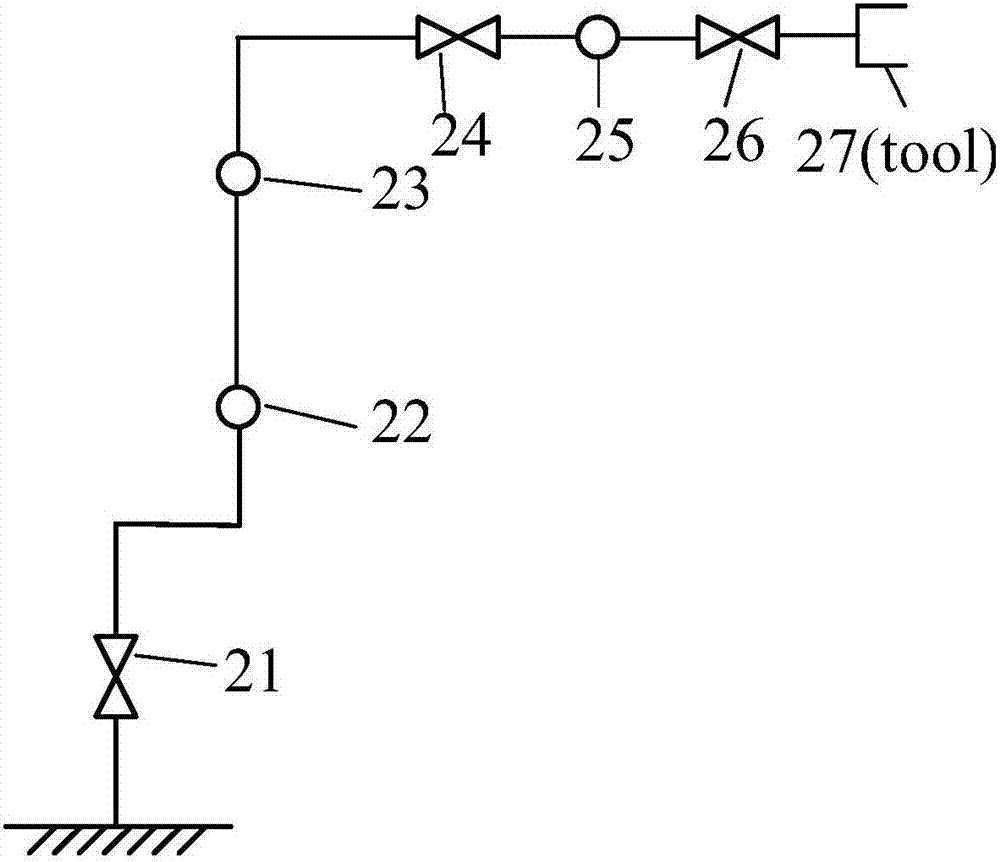
[0040] A method for identifying and compensating structural parameter errors of an industrial robot in an embodiment of the present invention can identify structural parameter errors step by step. Each joint of the industrial robot is a rotating joint or a moving joint. In this embodiment, it is set as figure 2 The six degrees of freedom industrial robot shown has six revolute joints and one manipulation tool. like figure 2 As shown, the rotation axes of the rotation joint 21, the rotation joint 24 and the rotation joint 26 are in the plane and pass through the common vertices of the two triangles. direction perpendicular to the plane.
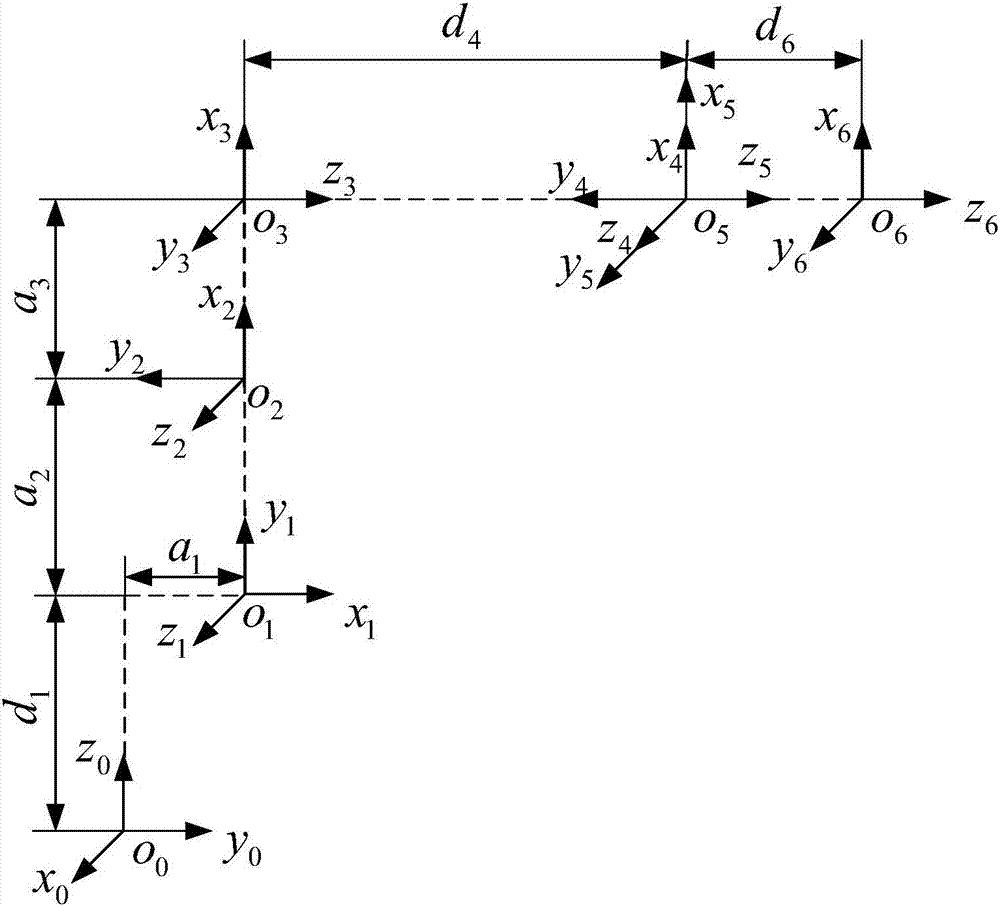
[0041] like image 3 As shown, establish the i-1 link coordinate system at the i-th joint of the industrial robot, and establish z along the direction of the rotation axis i-1 The shaft is fixedly connected with the connecting rod. x of the coordinate system of the i-th link i The direction of the axis must be perpendicular to z at the ...
Embodiment 2
[0077] A method for identifying and compensating structural parameter errors of an industrial robot in an embodiment of the present invention can simultaneously identify structural parameter errors. Each joint of the industrial robot is a rotating joint or a moving joint. In this embodiment, it is set as figure 2 The six degrees of freedom industrial robot shown has six revolute joints and one manipulation tool. In the state shown in the figure, the rotating shafts of the rotating joint 21, the rotating joint 24 and the rotating joint 26 are in the plane and pass through the common vertices of the two triangles, and the rotating axes respectively bisect the two triangles, and the rotating joint 22, the rotating joint 23 and the rotating joint The axis of rotation of 25 is in the direction perpendicular to the plane.
[0078] like image 3 As shown, establish the i-1 link coordinate system at the i-th joint of the industrial robot, and establish z along the direction of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com