

Mother and child robot cooperative work system, and operation method thereof
A technology of collaborative working system and working method, applied in control/adjustment systems, manipulators, harvesters, etc., can solve the problems of large amount of calculation, complicated positioning method and process, unable to successfully complete cleaning tasks, etc., to achieve high work efficiency, overcome the The effect of high obstacles and simplified system structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
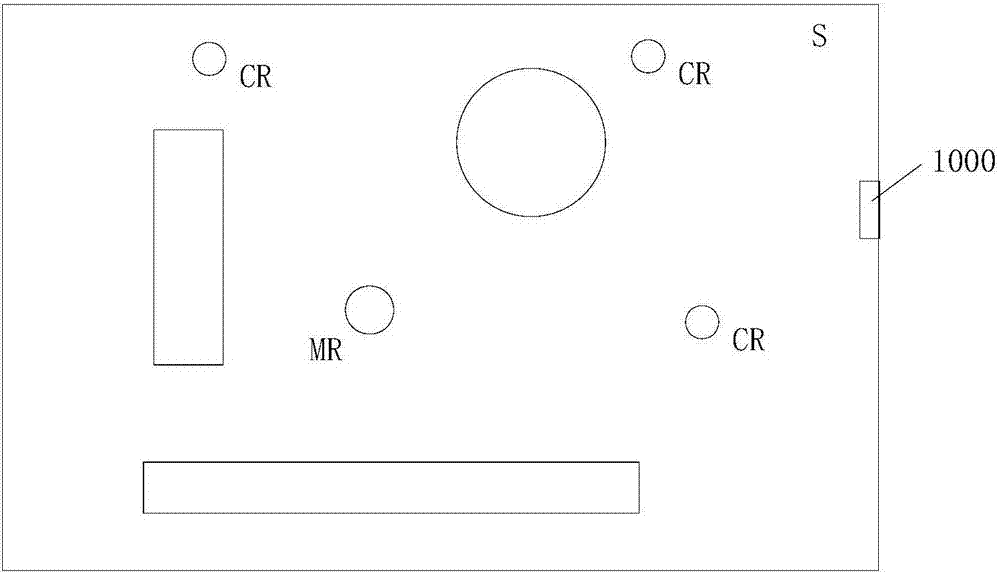
[0064] combine figure 2 As shown, in this embodiment, a laser ranging sensor (LDS) and a first infrared sensor are respectively provided on the master machine MR. The base machine first performs the cleaning operation on the operation area in the operation area, and obtains the plane map of all existing obstacles in the operation area through LDS scanning, and then further uses the first infrared sensor to scan the bottom surface of the existing obstacles and the surface of the operation area Make further judgments on the space between. The area without obstacles in the operation area is the area that can be cleaned. In the area with obstacles, the area where the space between the bottom surface of the obstacle and the surface of the operation area ≥ the height of the sub-machine body is recognized by the main machine as requiring assistance Clean up the area. After the cleaning of the master machine is completed, the working area map of the slave machine is obtained by fit...
Embodiment 2
[0066] combine figure 2 As shown, in this embodiment, the strike plate and the first infrared sensor are respectively provided on the main machine MR. The base machine first obtains the plane map of all existing obstacles in the work area through the collision plate, and then further judges the space between the bottom surface of the existing obstacles and the surface of the work area through the first infrared sensor. Similarly, the area without obstacles in the work area is the area that can be cleaned, and in the area with obstacles, the area where the space between the bottom surface of the obstacle and the surface of the work area ≥ the height of the sub-machine body is recognized by the main machine To assist in cleaning the area. After the cleaning of the master machine is completed, the working area map of the slave machine is obtained by fitting the area to be assisted in cleaning, and the master machine passes the above-mentioned Figure 4 Obtain the pose informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More