

Self-adaptive pneumatic tong for casting robot
An adaptive, robotic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of workpiece clamping point damage, small contact area between the jaws and the inner surface of the workpiece, etc., to achieve high safety and reduce labor intensity. And the effect of production cost, operation and maintenance is simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments and illustrations.
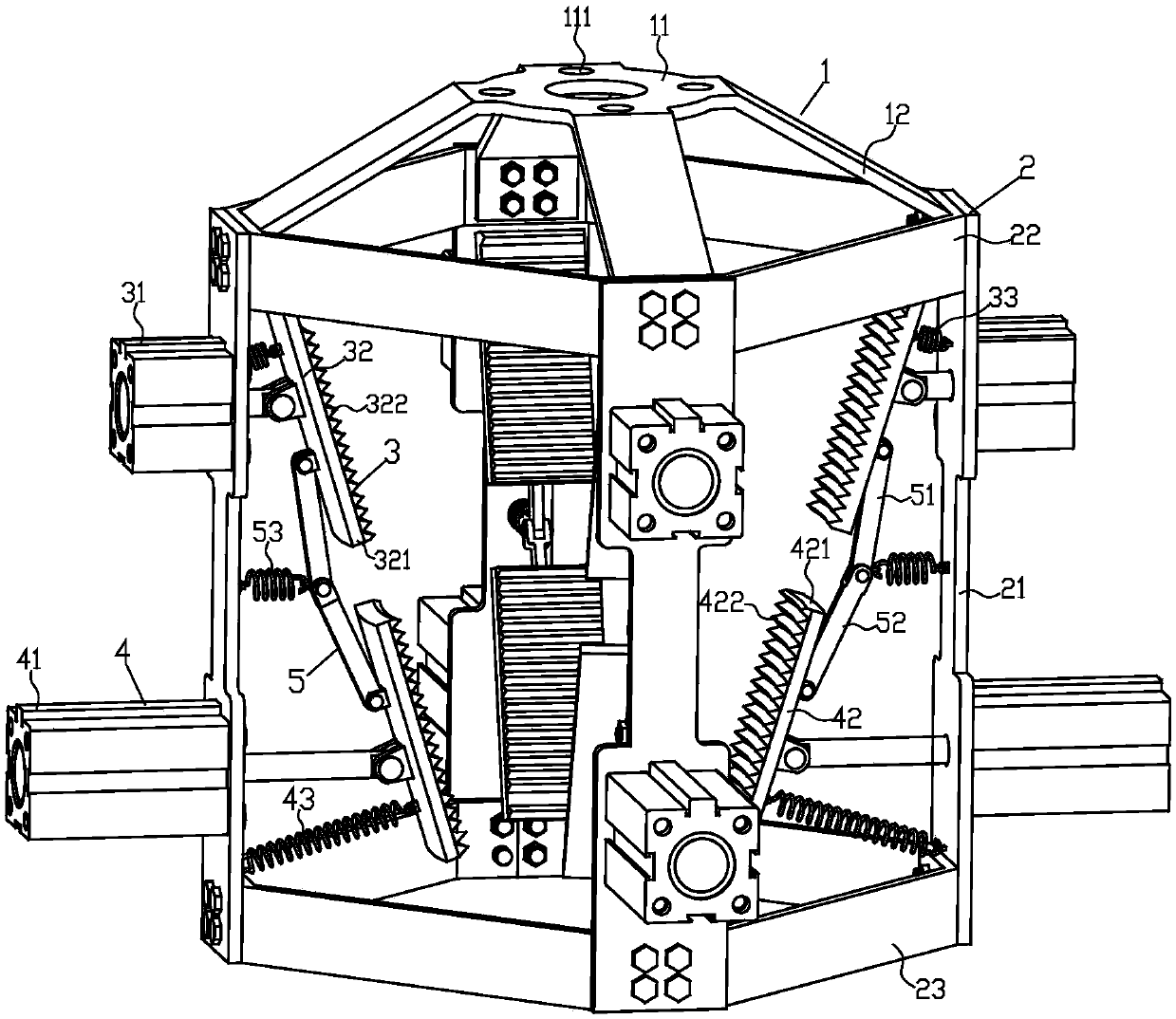
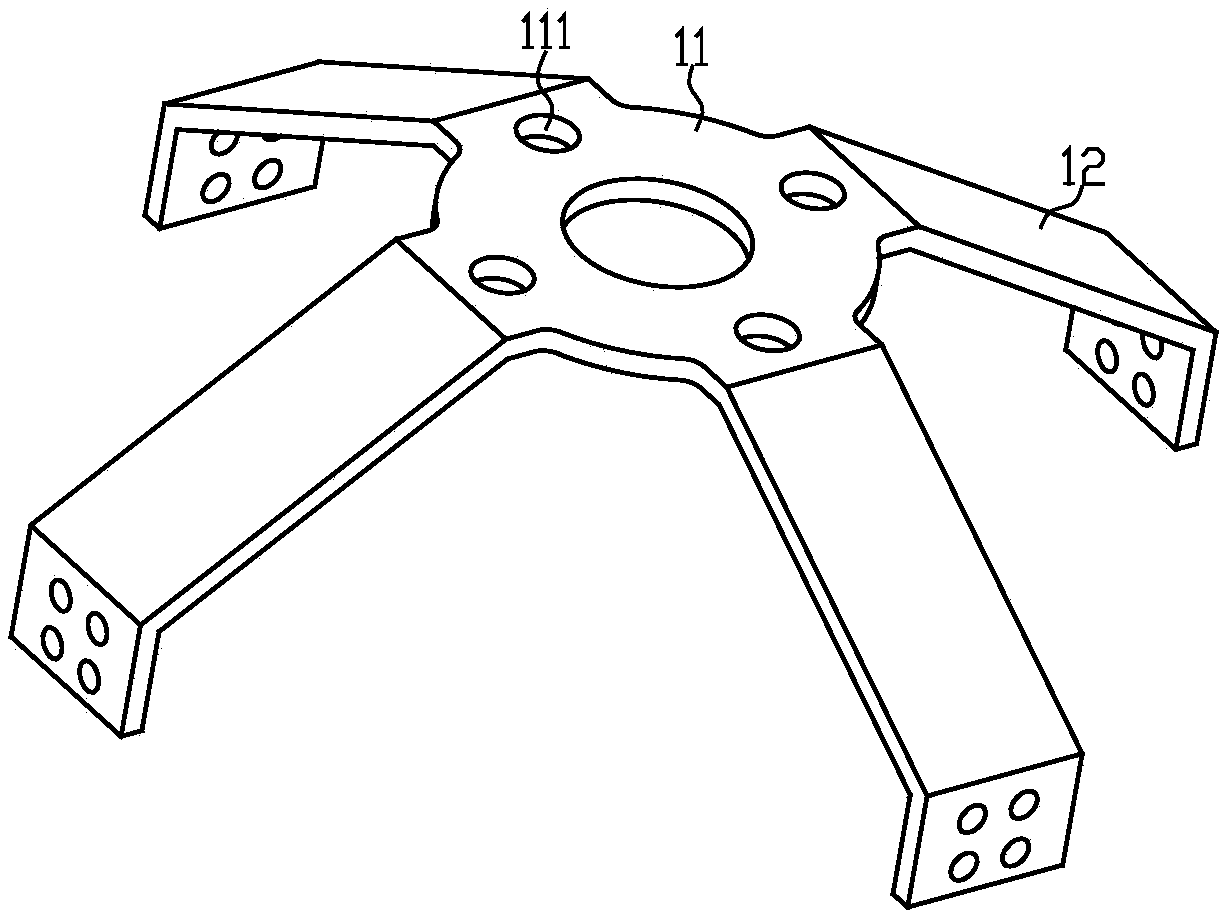
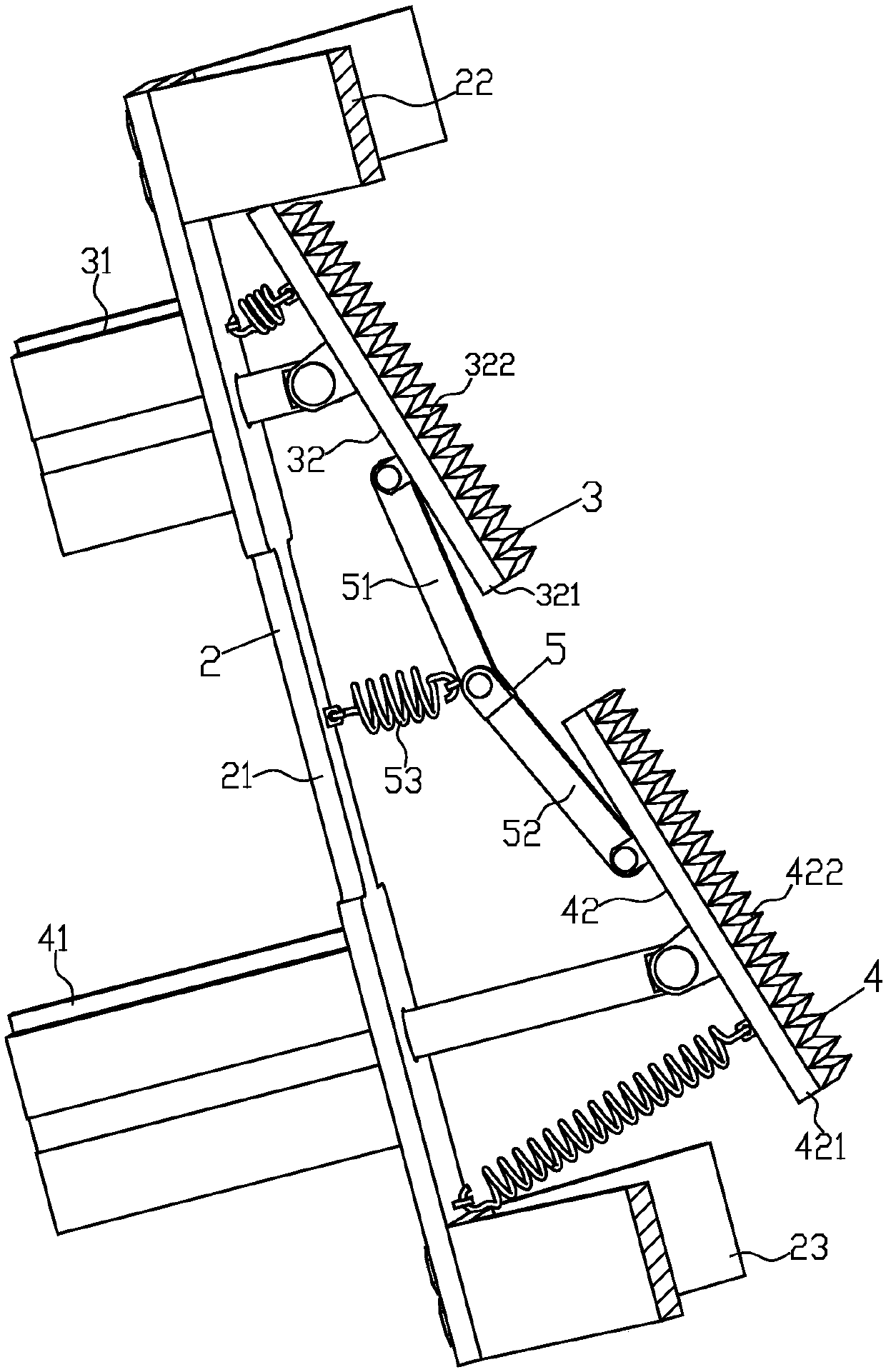
[0021] Such as figure 1 , figure 2 , image 3 and Figure 4As shown, an adaptive pneumatic gripper for a casting robot includes a connecting support 1 , a main bracket 2 , an upper clamping device 3 , a lower clamping device 4 and an adaptive adjustment link assembly 5 . Wherein, the connecting support 1 includes a connecting flange 11 and a connecting support plate 12, and the connecting flange 11 is provided with a mounting hole 111 connected with the hand flange of the casting robot. The inner end of the plate 12 is fixedly connected with the connecting flange 11 , and the outer end of the connecting support plate 12 is fixedly connected with the upper end of the main bracket 2 . The main bracket 2 is located below t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More