

Master-slaver heterogeneous teleoperation control system and method of robot arm with telepresence
A teleoperation control and telepresence technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem that the force sense technology is not indispensable and the visual presence technology is not widely used, so as to enhance the sense of operation, Good operation and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
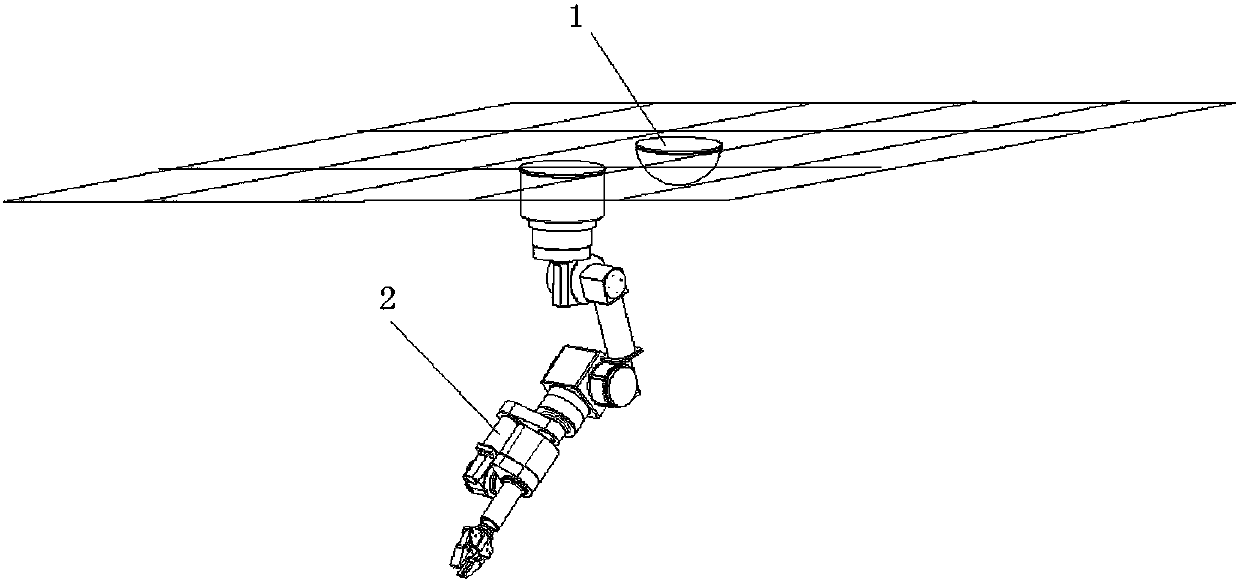
[0035] like figure 1 , a robot master-slave heterogeneous teleoperation control system with a sense of presence, including a global environment monitoring camera 1, an end monitoring camera 2, a central controller with a display screen, and a mechanical arm with a main hand at the front end; the main hand has The force feedback device, the main hand communicates with the central controller through Ethernet data, the global environment monitoring camera and the terminal monitoring camera realize data interaction through Ethernet, and display the collected video data on the screen of the central controller, and the mechanical arm communicates through TCP / The IP protocol is connected with the data of the central controller.
[0036] This is one of the most basic embodiments of the invention. The robot is operated through the video display, and the central controller converts and calculates the position information of the main hand and the mechanical arm detected by the global e...
Embodiment 2
[0038] like figure 1 , a robot master-slave heterogeneous teleoperation control system with a sense of presence, including a global environment monitoring camera 1, an end monitoring camera 2, a central controller with a display screen, and a mechanical arm with a main hand at the front end; the main hand has The force feedback device, the main hand communicates with the central controller through Ethernet data, the global environment monitoring camera and the terminal monitoring camera realize data interaction through Ethernet, and display the collected video data on the screen of the central controller, and the mechanical arm communicates through TCP / The IP protocol is connected to the data of the central controller; the terminal monitoring camera 2 is set at the wrist joint of the mechanical arm, and the global environment monitoring camera 1 and the terminal monitoring camera 2 form a camera with the function of extracting the depth of field information of the target item....
Embodiment 3
[0041] like figure 1 , a master-slave heterogeneous teleoperation control method for a robot with a sense of presence, comprising the following steps:
[0042] Define the three-dimensional base coordinate system of the camera, main hand and robotic arm respectively;
[0043] The central controller obtains the position and orientation of the main hand in the three-dimensional base coordinate system of the main hand or the three-dimensional base coordinate system of the mechanical arm, as well as the force feedback data of the main hand through communication;
[0044] The pose data of the main hand or the manipulator in the three-dimensional base coordinate system of the camera is collected by the global environment monitoring camera 1 and the terminal monitoring camera 2;
[0045] Transform the pose of the main hand in the three-dimensional base coordinate system of the main hand into the three-dimensional base coordinate system of the manipulator through the conversion of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More