

Marine strapdown inertial navigation system horizontal-damping method based on LMS (Least mean square) algorithm
A LMS algorithm and strapdown inertial navigation technology, applied in the field of navigation, can solve the problems of sensitive parameter selection, unusable, easy to interfere with GPS, etc., and achieve the effect of improving overall performance, small calculation amount, and good damping effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
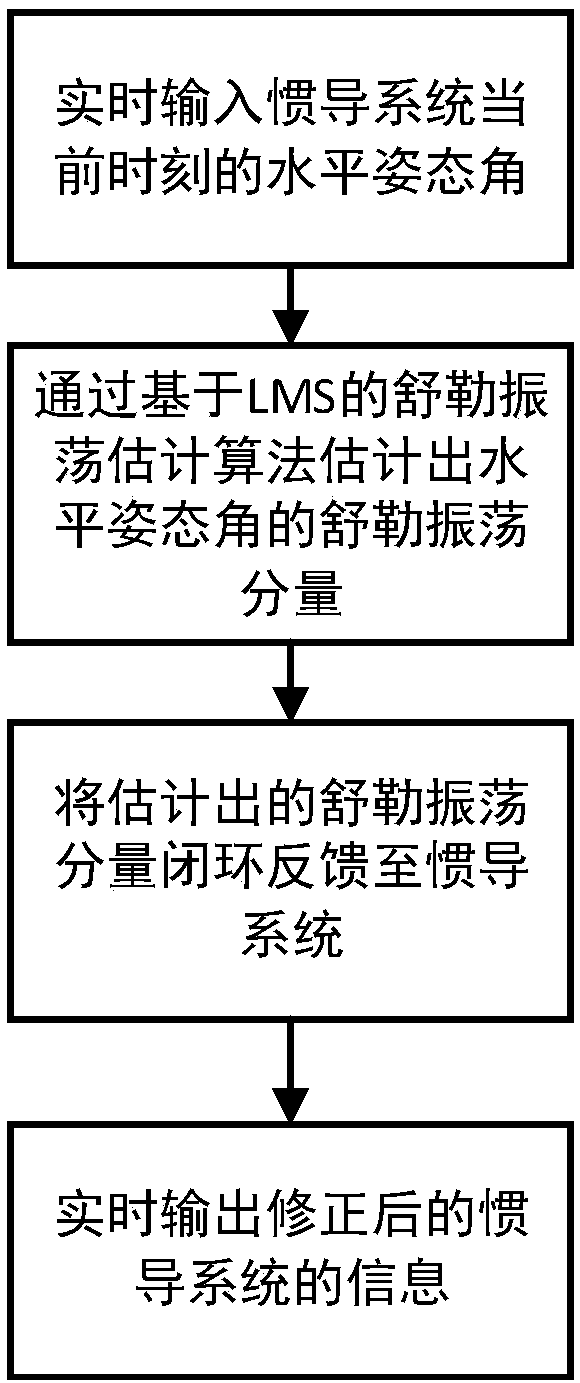
[0044] The method of the present invention will be further elaborated in conjunction with the accompanying drawings.
[0045] Due to the influence of the marine environment, the ship inevitably performs pitch and roll motions during sea navigation and the period of the pitch and roll motion is within a specific frequency band. The marine strapdown inertial navigation equipment can measure the angle of the ship's three axes. The motion information, that is, the pitch and roll angle information output by the inertial navigation system is also in a specific frequency band. In addition, due to the influence of the Schuler loop in the inertial navigation system, the pitch and roll angle output also contains the Schuler oscillation component.
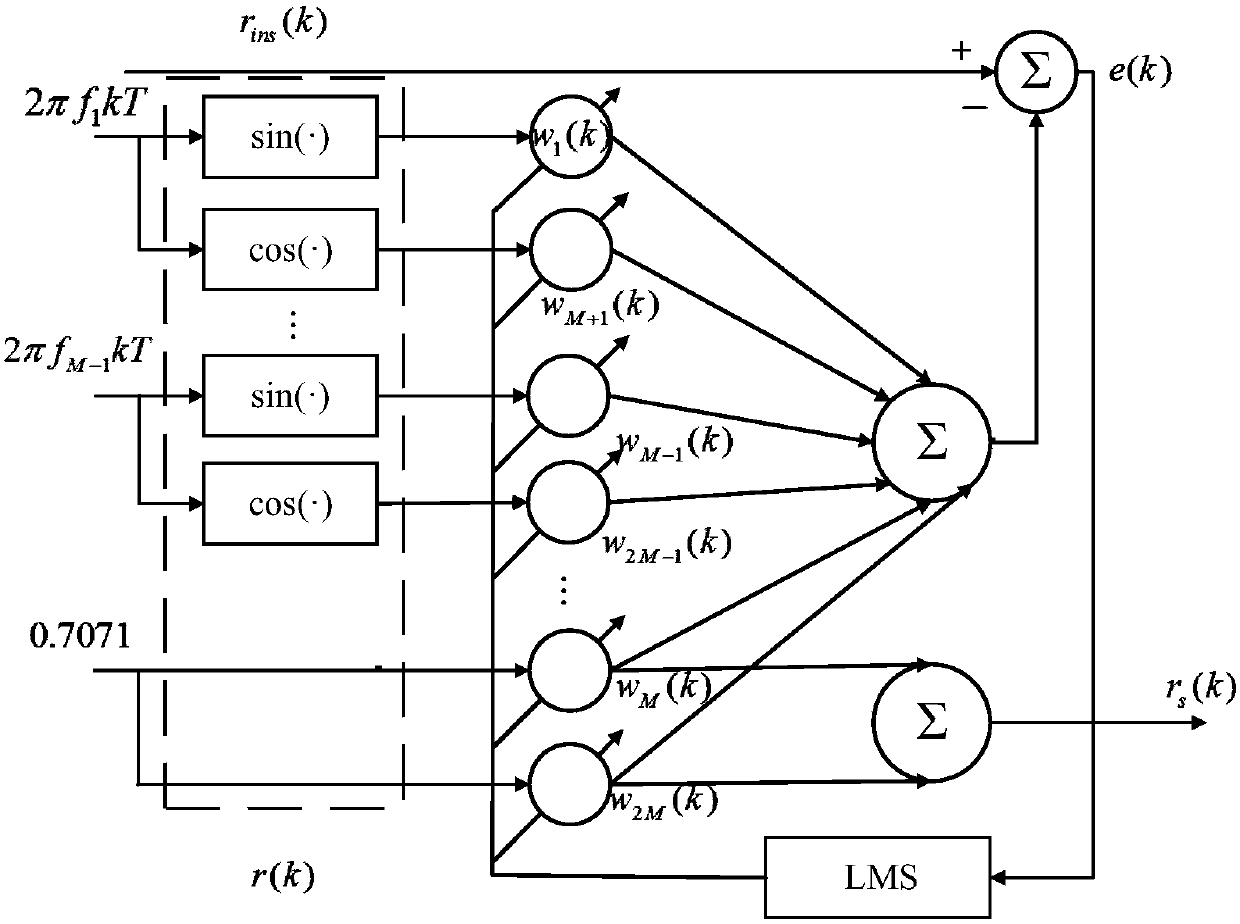
[0046] Since the characteristics of the pitch and roll information output by the inertial navigation equipment are similar, this manual only processes the roll information, and the method for processing the pitch information is the same. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More