

Redundancy degree-of-freedom mechanical arm movement planning and evaluating method based on arm-shaped angle interval
A technology of motion planning and evaluation method, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as large amount of calculation in motion planning, integral drift error, easy to fall into local extremum, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] Below in conjunction with accompanying drawing and specific embodiment, the present invention will be further described:
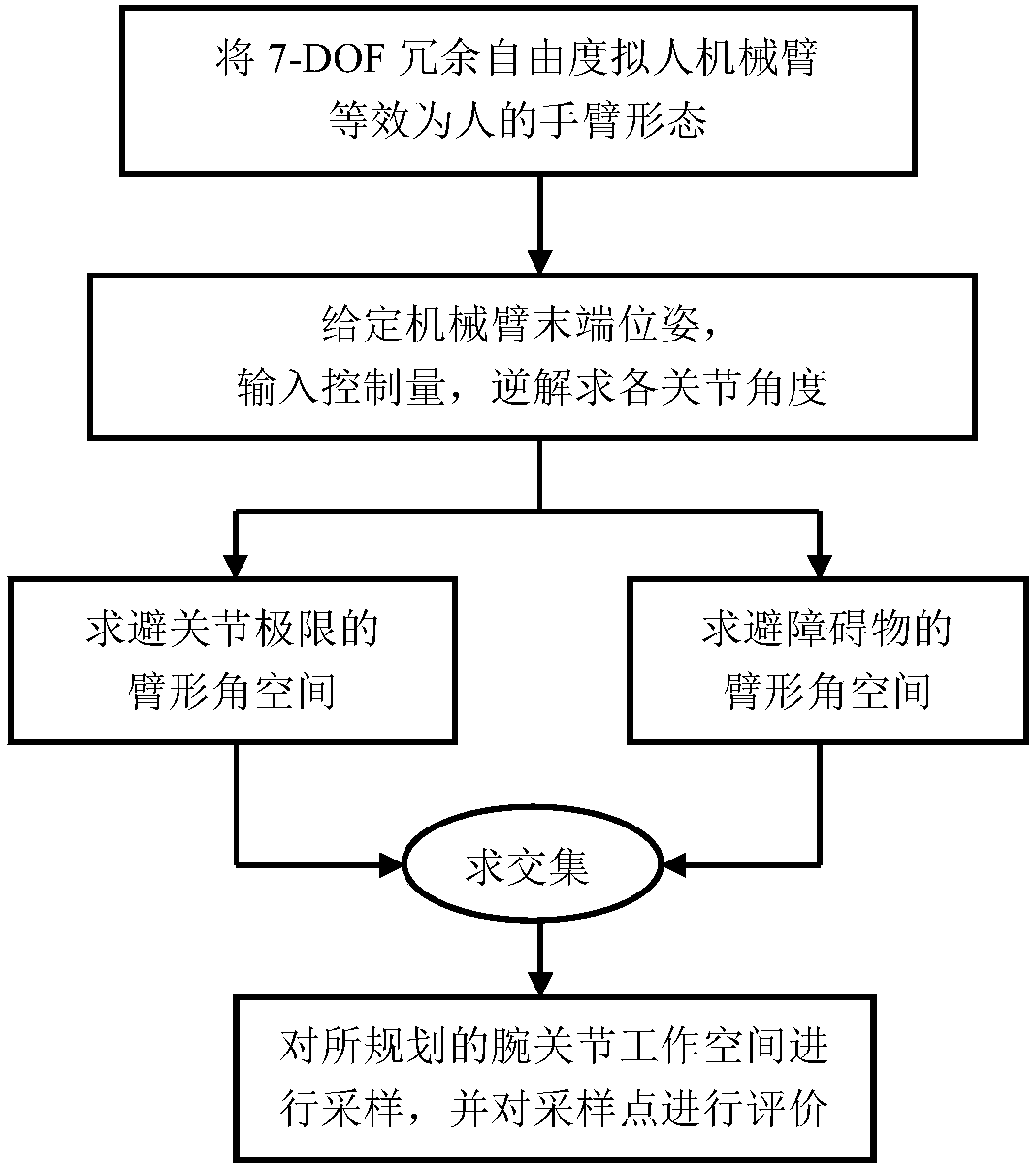
[0072] A redundant degree of freedom mechanical arm motion planning and evaluation method based on the arm shape angle interval of the present invention, figure 1 Shown is the solution flowchart of the present invention's implementation of the mechanical arm motion planning method, and the implementation process of the method is as follows:
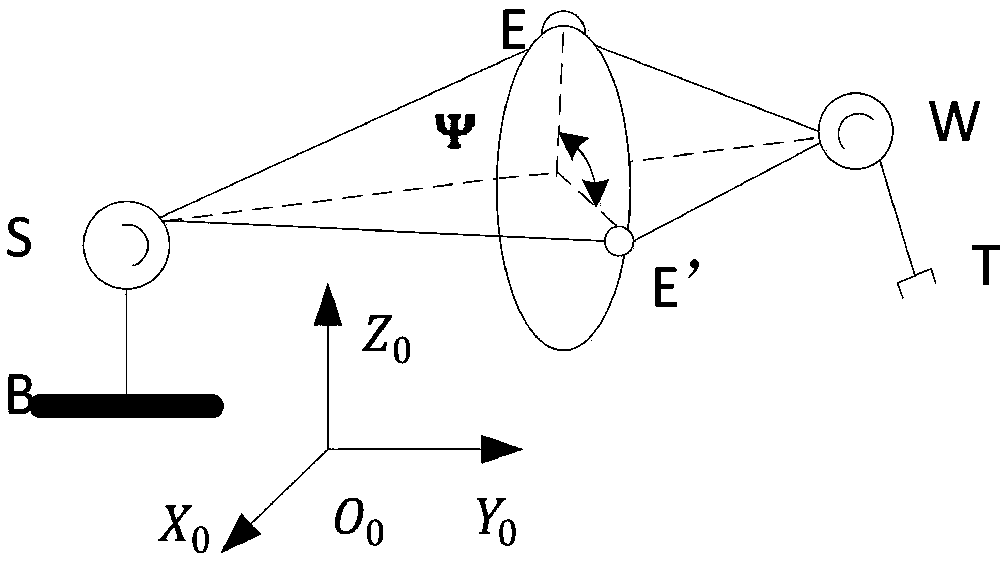
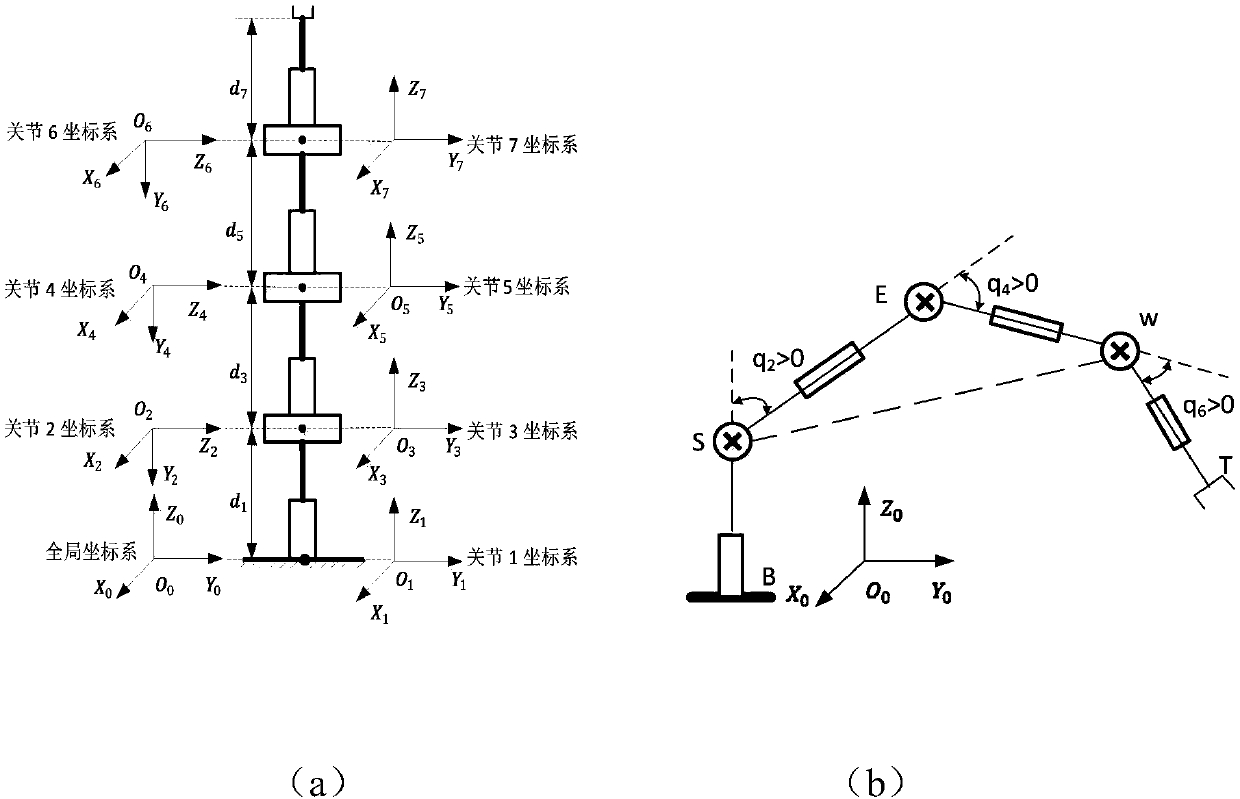
[0073] Step 1: Use the D-H method to establish a coordinate system, such as image 3 In (a) shown. Rotate the coordinates of the first three joints of the base of the 7R robotic arm to coincide with the spherical joint with the origin of the coordinate system of the third joint as the center of the sphere. The first three joints are equivalent to the shoulder joint S; similarly, the The coordinates of the last three joints at the end are rotated, coincident with the spherical joint centered on the origin of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More