

Underwater robot trajectory tracking backstepping control method
A technology of underwater robot and backstep control, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of poor practicability and achieve the effect of good practicability and high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
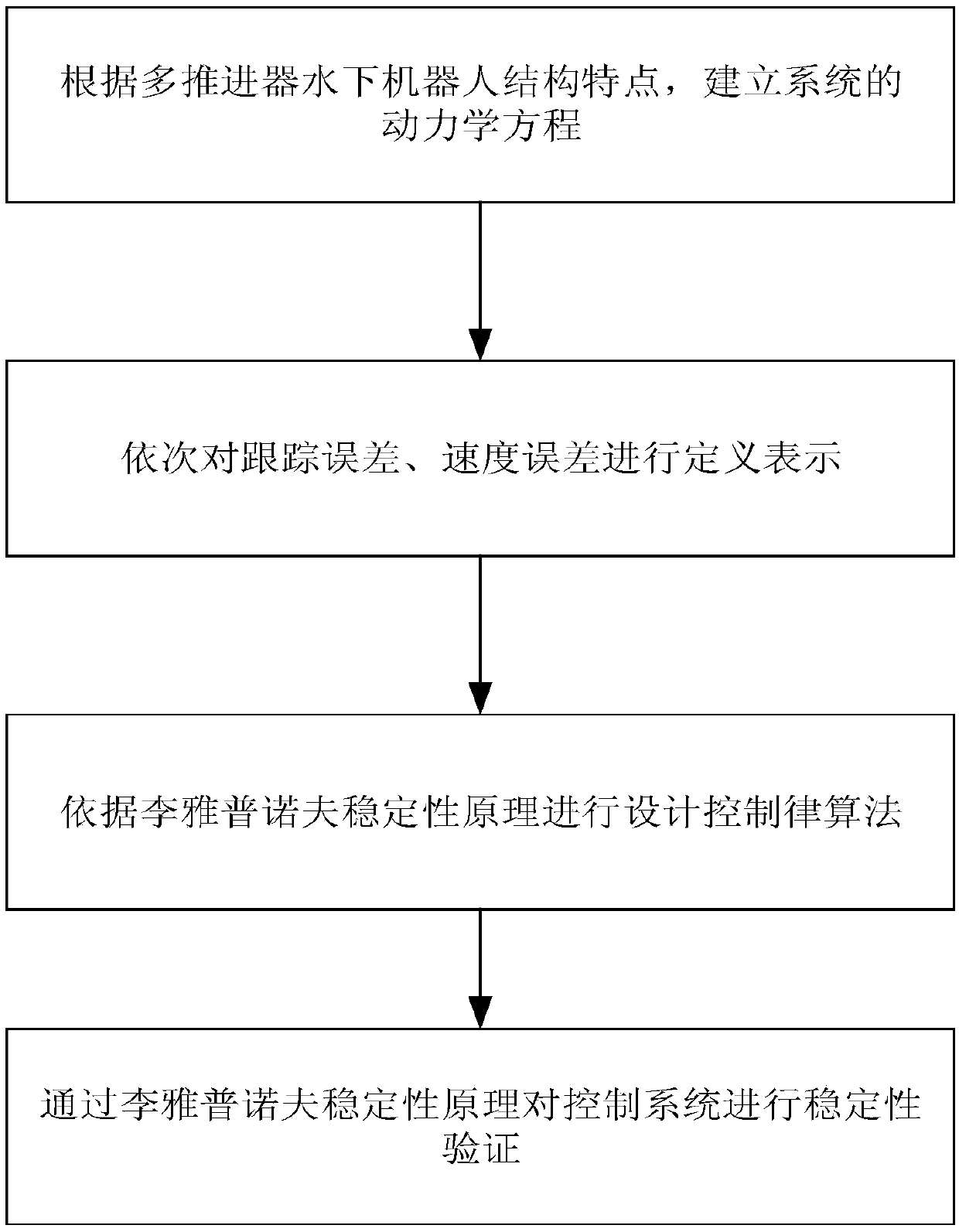
[0032] refer to figure 1 . The specific steps of the underwater robot trajectory tracking backstepping control method of the present invention are as follows:
[0033] Step 1. The six-degree-of-freedom motion equation based on the body coordinate system of the underwater robot:
[0034]
[0035] where M is a generalized mass positive definite matrix, is the position and yaw angle of the underwater robot, v=[u r v r r] is the generalized water velocity, u r v r r are longitudinal, transverse and lateral velocity and yaw rate, respectively, is the yaw angle, C(v) is the oblique symmetric matrix of the generalized drag coefficient, D(v) is the hydrodynamic parameter, τ c is the control torque vector; the values of each matrix and parameters are as follows:
[0036]
[0037] where m 11 =47.5,m 22 =94.1,m 33 =13.6,m 23 =m 32 =5.2, d 11 =13.5, d 22 =50.2, d 33 =27.2,d 23 =41.4, m 32 = 17.3.
[0038] Step 2. First define the tracking error of the gen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More