

Noise reduction method and real-time monitoring system for real-time monitoring current value of underwater robot propeller
An underwater robot, real-time monitoring technology, applied in the direction of measuring current/voltage, measuring electrical variables, instruments, etc., can solve the problems of large average relative error, root mean square error, limited effect of wavelet noise reduction method, etc., to reduce the average error , the effect of reducing the effect of random noise interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
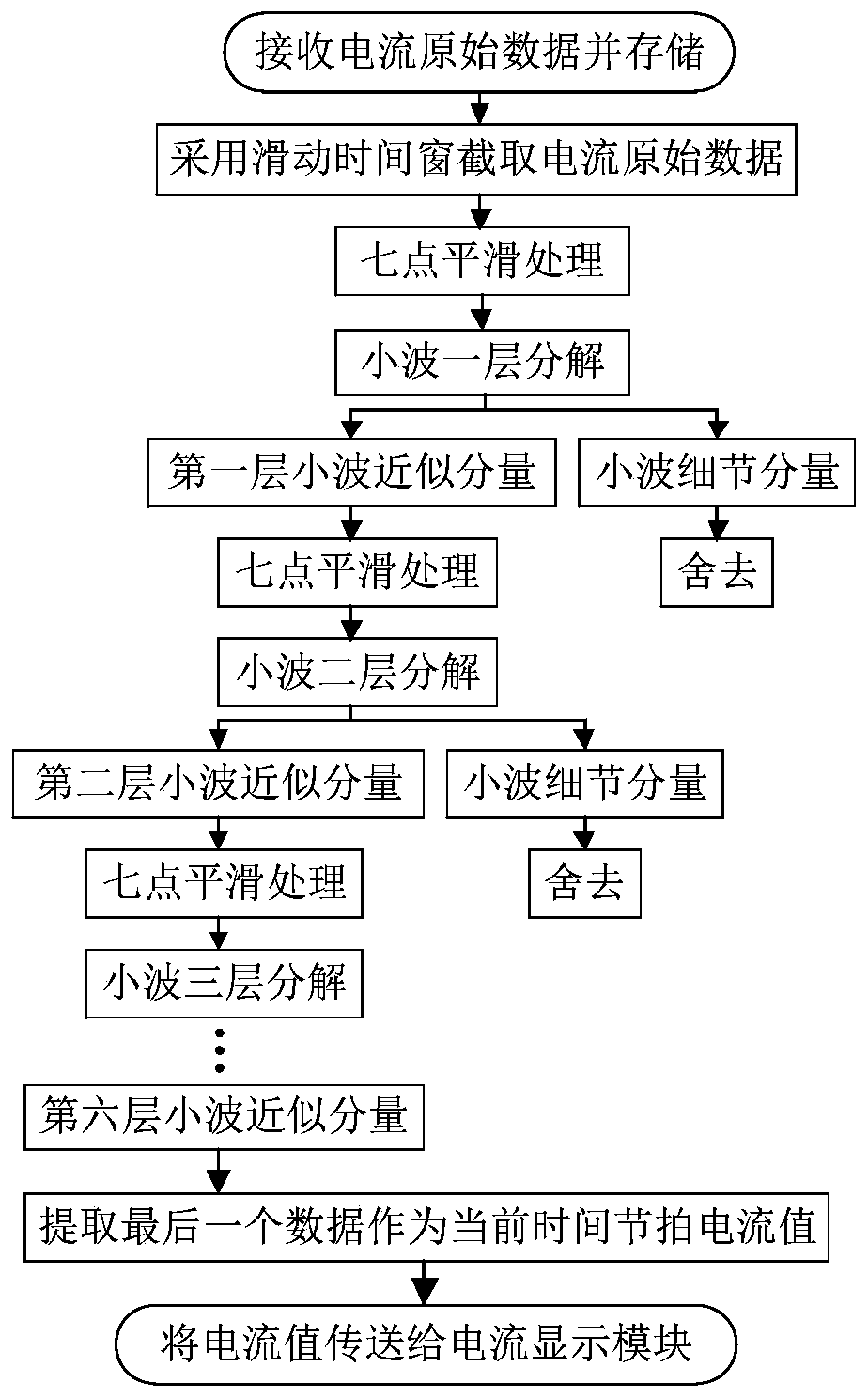
[0032] Such as figure 1 As shown, a noise reduction method for real-time monitoring of the current value by the thruster of an underwater robot, its specific implementation steps are as follows:
[0033] The first step is to receive the current raw data sent by the CPU system module of the underwater robot and store it;
[0034] In the second step, a sliding time window whose length is L=200 is used to intercept the current time beat (here, each time beat is set to 0.2 seconds) and the current raw data of the previous 199 time beats;
[0035] The third step is to carry out seven-point smoothing processing to the second step data, and carry out wavelet decomposition to the processed data, the wavelet basis function is "DB4", the number of decomposition layers is 1, and the wavelet approximate component of the first layer is extracted; the seve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More