

Three-dimensional attitude display and remote automatic control system of excavator
An automatic control system and three-dimensional attitude technology, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problems of poor software versatility, coordination of measurement and control systems, and difficult engineering implementation, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
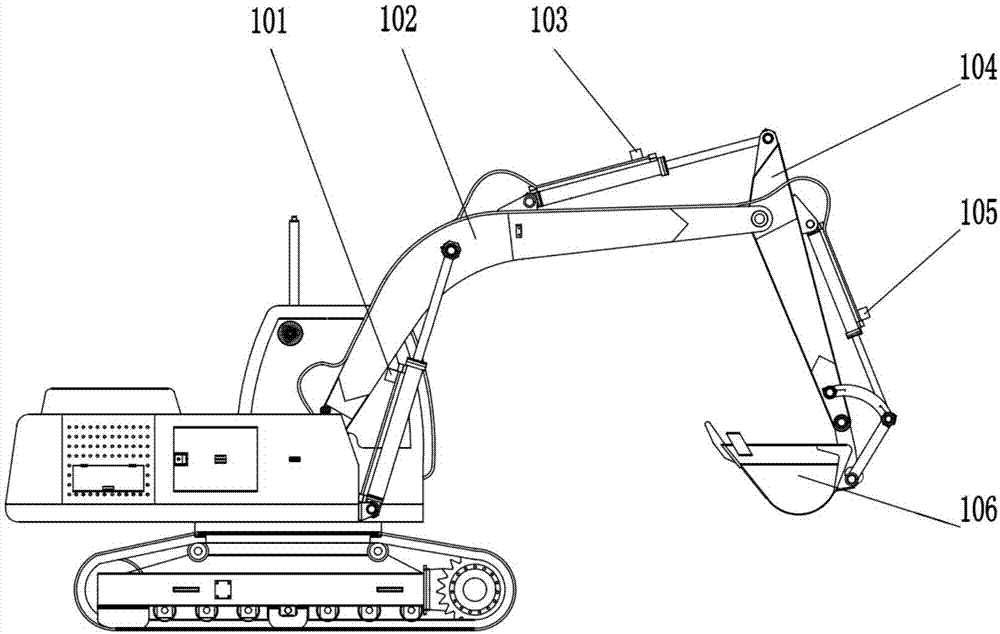
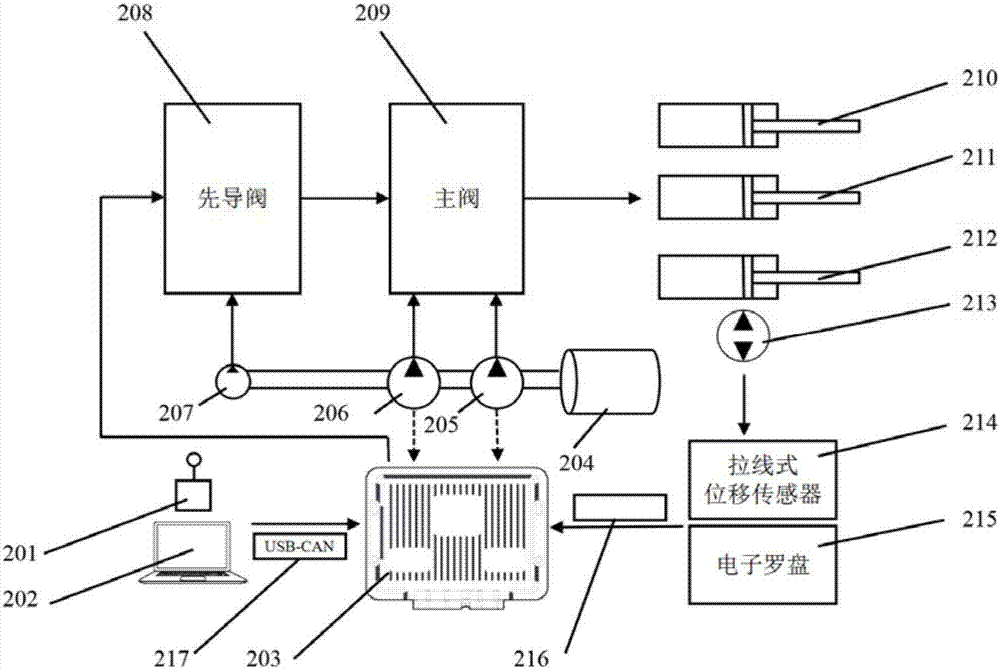
[0079] Such as figure 1 and figure 2 As shown, the three-dimensional posture display and its remote automatic control system of the present invention include an excavator operation module, a data acquisition module, a computer 202 (the computer includes a real-time trajectory calculation module), a trajectory control module, an operation information monitoring module, a data storage module and a three-dimensional visualization module,
[0080] The excavator operation module includes an oil control loop composed of an operating handle 201, a computer 202, a DSP controller 203, an electro-hydraulic proportional valve 208 and a multi-way valve 209; an oil supply circuit composed of a pilot pump 207, a front pump 205 and a rear pump 206 Components: boom hydraulic cylinder 210, stick hydraulic cylinder 211, bucket hydraulic cylinder 212 and swing motor 21...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More