

Front barrier detection system and method for unmanned driving automobile
An unmanned vehicle and obstacle detection technology, which is applied in the field of vehicle obstacle detection, can solve the problems of high cost, false detection and missed detection of sensors, and poor practicability, so as to improve the speed and reduce the possibility of misjudgment , the effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings.
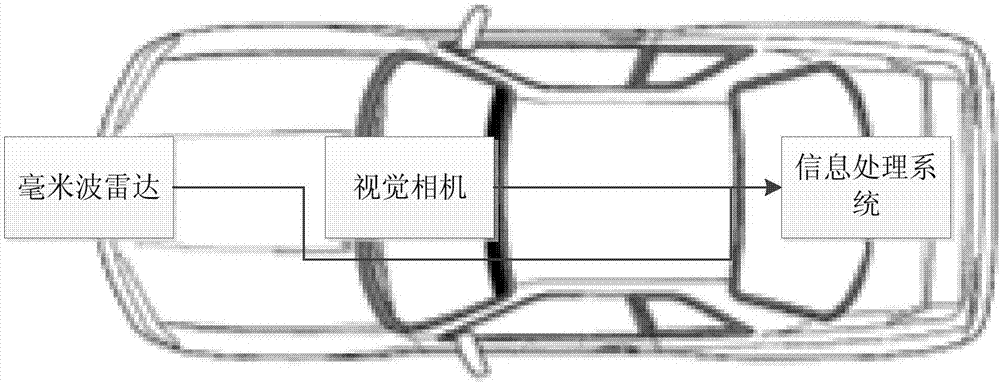
[0034] like figure 1 As shown, the obstacle detection system of the present invention includes a millimeter-wave radar, a visual camera and an information processing system. ) are connected, and the information used to detect obstacles ahead includes distance and speed information. The transmission frequency of the millimeter wave radar is 77GHz, which can effectively detect obstacles ahead. The visual camera is installed on the right side of the vehicle rearview mirror in the front windshield, and is connected to the industrial computer through the 1394 interface. After the camera is calibrated using the Zhang Zhengyou calibration method, the information used to detect obstacles includes size and distance information. The information processing system adopts an industrial computer equipped with a Windows system, and the obstacle display method is a grid map;
[003...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More