

Design method for Variable parameter neural solver for motion planning of redundancy mechanical arm
A motion planning and design method technology, applied in the direction of manipulators, program control manipulators, instruments, etc., can solve unreasonable and unsatisfactory problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
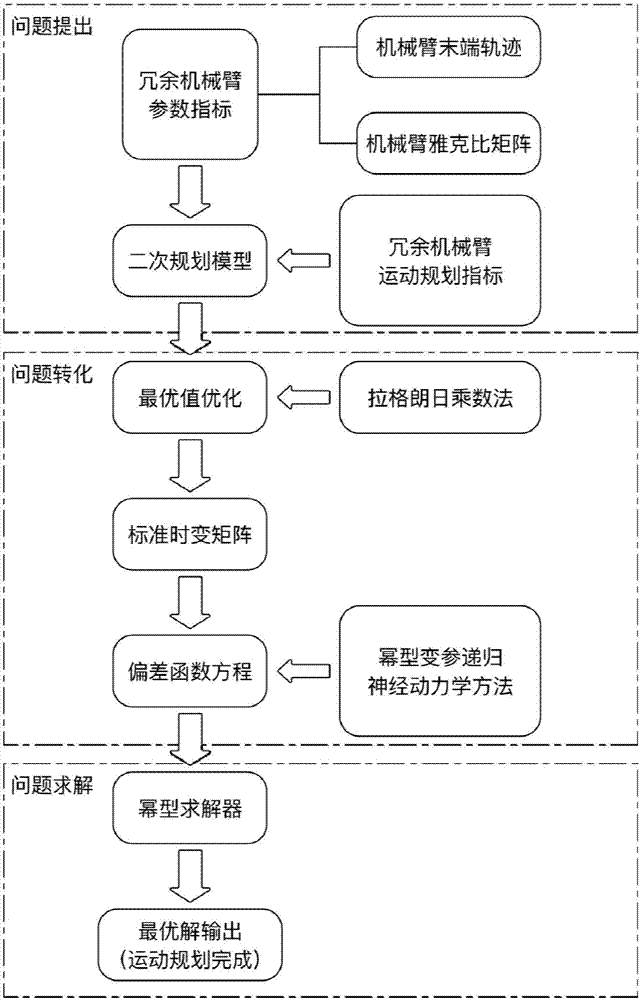
[0073] figure 1 Shown is the flowchart of the variable parameter neural solver design method of the example of the present invention; A kind of variable parameter neural solver design method for redundant manipulator motion planning comprises the steps:
[0074] 1) According to the task to be solved, the performance index and constraint conditions of the redundant manipulator are formalized, that is, the parameter index of the actual redundant manipulator is modeled, and the physical system model is established;
[0075] 2) converting the physical system model in step 1) into the time-varying quadratic programming standard form of the system;
[0076] 3) according to Lagrangian multiplier method, the quadratic programming model in step 2) is carried out optimal value optimization;
[0077] 4) converting the optimization information in step 3) into a standard time-varying matrix form;
[0078] 5) based on the matrix design deviation function equation in step 4);
[0079] 6) ...
Embodiment 2
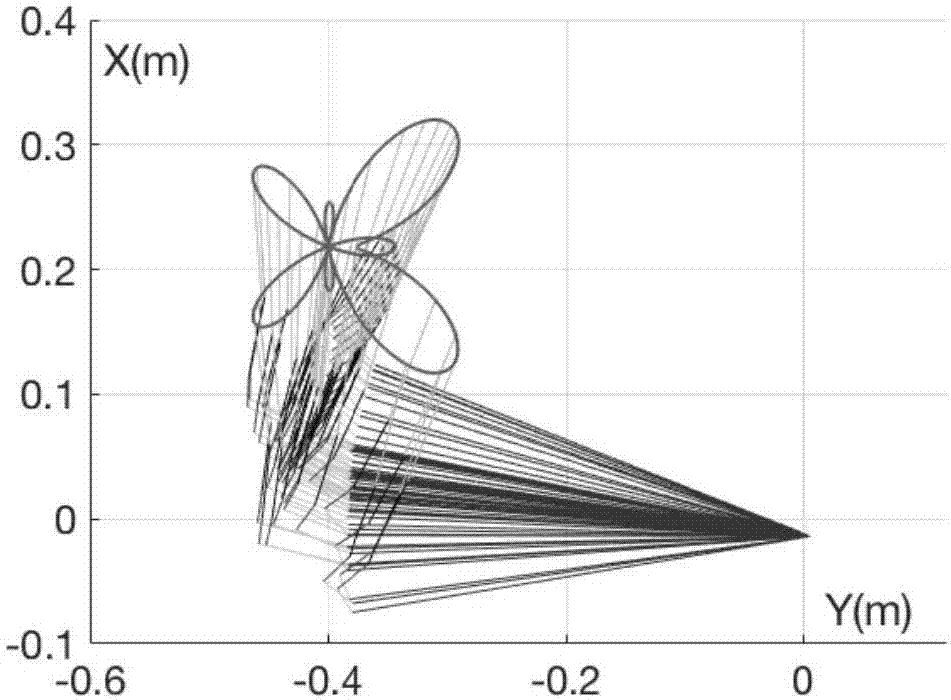
[0128] In order to demonstrate the actual system design process, a 6-degree-of-freedom manipulator example is used to illustrate the problem: the MATLAB simulation experiment of this example is based on Kinova-JACO 2 Based on the lightweight bionic robotic arm. The total weight of this type of robotic arm is 4.4kg, and the maximum control distance is 77cm.
[0129] This type of redundant robotic arm contains a total of 6 degrees of freedom, that is, θ(t) contains 6 elements; the spatial dimension at the end of the robotic arm is 3, including three directions: X axis, Y axis, and Z axis; Its Jacobian matrix is The initial joint angle of the redundant manipulator is set as θ(0)=[1.675,2.843,-3.216,4.187,-1.710,-2.650]; the task execution cycle t is set to 8s; the parameter γ is set to Set at 50. In this example, in order to demonstrate the superiority of the variable parameter neural solver proposed by the present invention for redundant manipulator motion planning, the Kino...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More