

Line laser weld joint automatic tracking system and method for six-axis industrial robot
A technology of industrial robots and robot lines, applied in laser welding equipment, welding equipment, manufacturing tools, etc., can solve the problems of low efficiency, complicated operation and low precision, and achieve the effect of improving efficiency, saving time and improving production efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described in detail below with reference to the embodiments and accompanying drawings, but the embodiments of the present invention are not limited thereto.
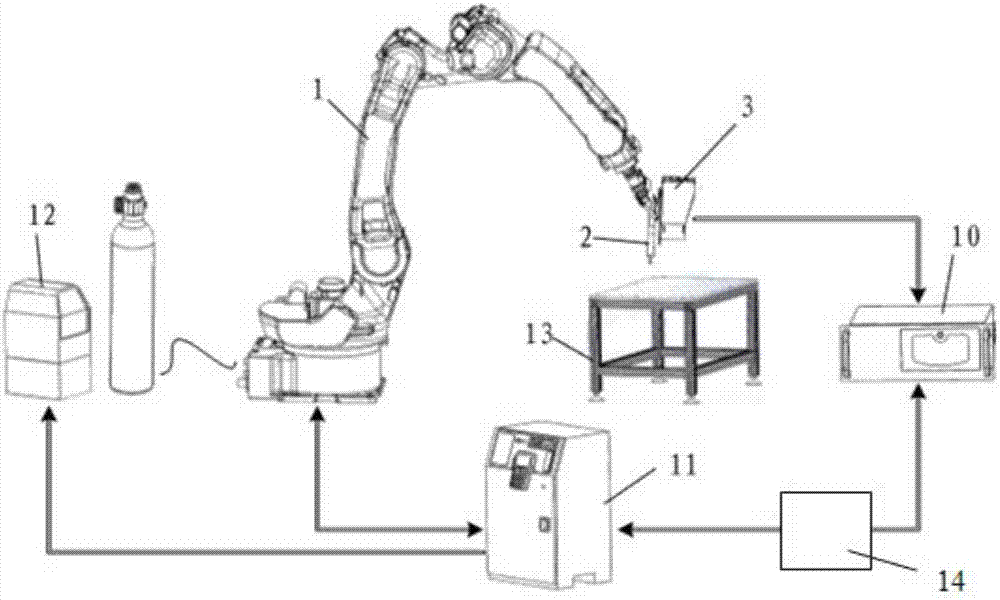
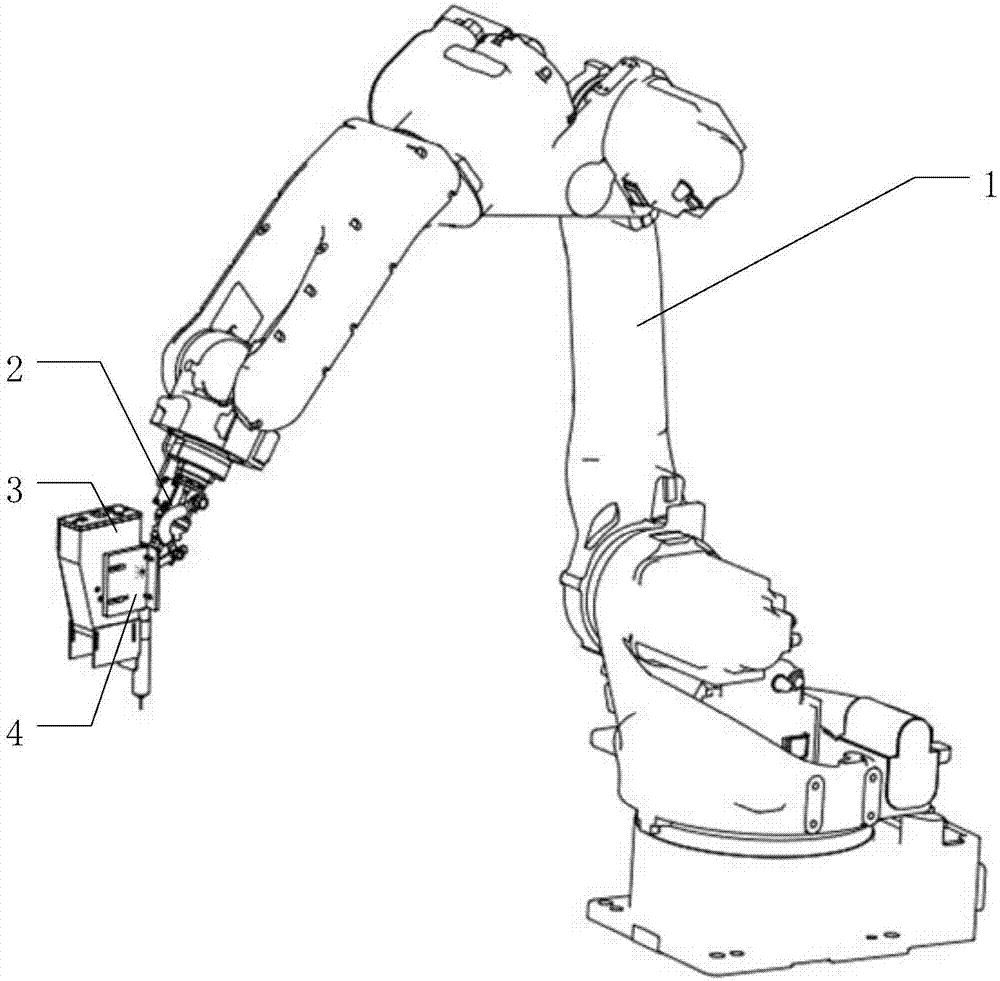
[0057] Such as figure 1 and figure 2 As shown, a six-axis industrial robot line laser welding seam automatic tracking system includes a six-axis industrial robot 1, a welding torch 2, a line laser vision sensor 3, a workbench 13, welding supporting equipment 12, an embedded industrial controller 10, a multiplier Fu module 14, control cabinet 11, the workpiece is placed on the workbench 13, the position and inclination angle of the workpiece can be manually adjusted, the line laser vision sensor 3 is fixedly installed at the end of the welding torch 2, and the welding torch 2 is installed on the six At the end of the axis industrial robot 1, the embedded industrial controller 10 is connected to the line laser vision sensor 3 through an Ethernet cable, the welding torch 2 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More