Intelligent multi-rotor UAV based on on-board computer and realization method thereof
A multi-rotor unmanned aerial vehicle, airborne computer technology, applied in the direction of rotorcraft, motor vehicles, instruments, etc., can solve the problems of poor maneuverability, high crash rate, limited application of multi-rotor unmanned aerial vehicles, etc., reaching the level of human-machine communication Improvements in lift, reliability and maintainability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
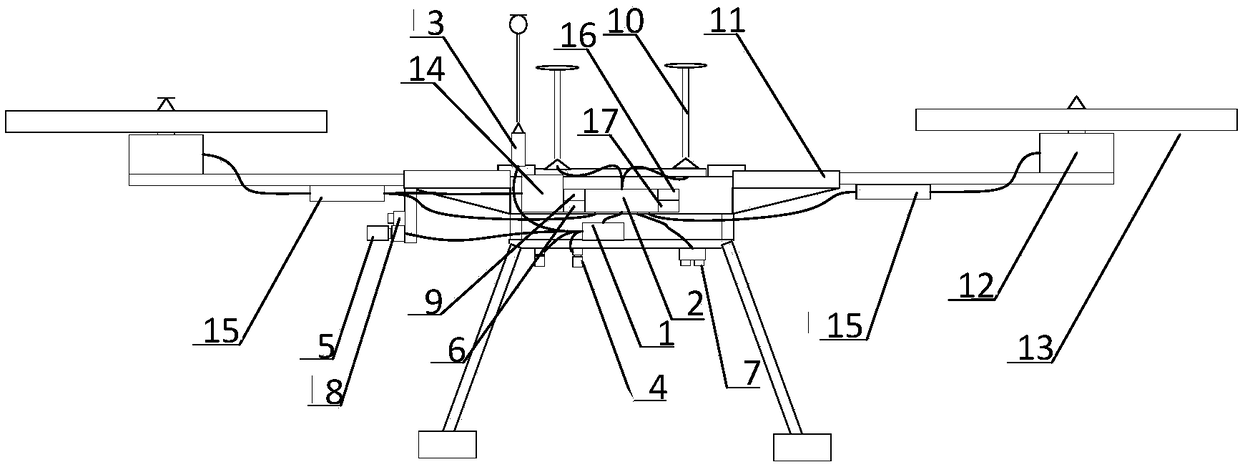
[0048] Such as Figure 1-4 As shown, an intelligent multi-rotor UAV based on an airborne computer includes an airborne computer 1, a flight control board 2, a communication module 3, a lower camera group 4, a horizontal multi-eye camera array 4, an air pressure altitude sensor 6, Lower laser ranging sensor 7, front laser ranging sensor 8, electronic compass group 9, satellite navigation sensor group 10, frame 11, motor group 12, propeller 13, battery pack 14, electronic governor group 15, gyroscope Instrument group 16 and accelerometer group 17.
[0049] Airborne computer 1, flight control board 2, communication module 3, lower camera group 4, horizontal multi-eye camera array 4, barometric altitude sensor 6, lower laser ranging sensor 7, front laser ranging sensor 8, electronic compass Group 9, satellite navigation sensor group 10, motor group 12, propeller 13, battery group 14, electronic governor group 15, gyroscope group 16 and accelerometer group 17 are all arranged on t...
Embodiment 2
[0073] A method for realizing an intelligent multi-rotor unmanned aerial vehicle based on an airborne computer, comprising the steps of:
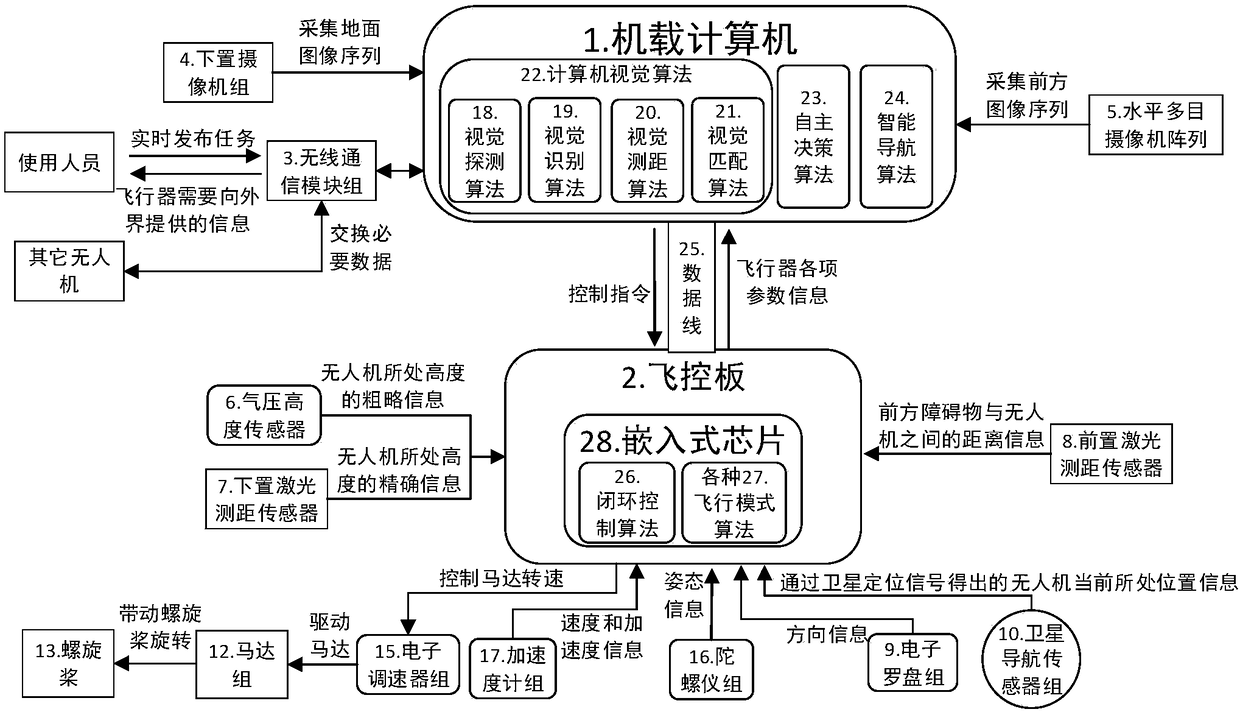
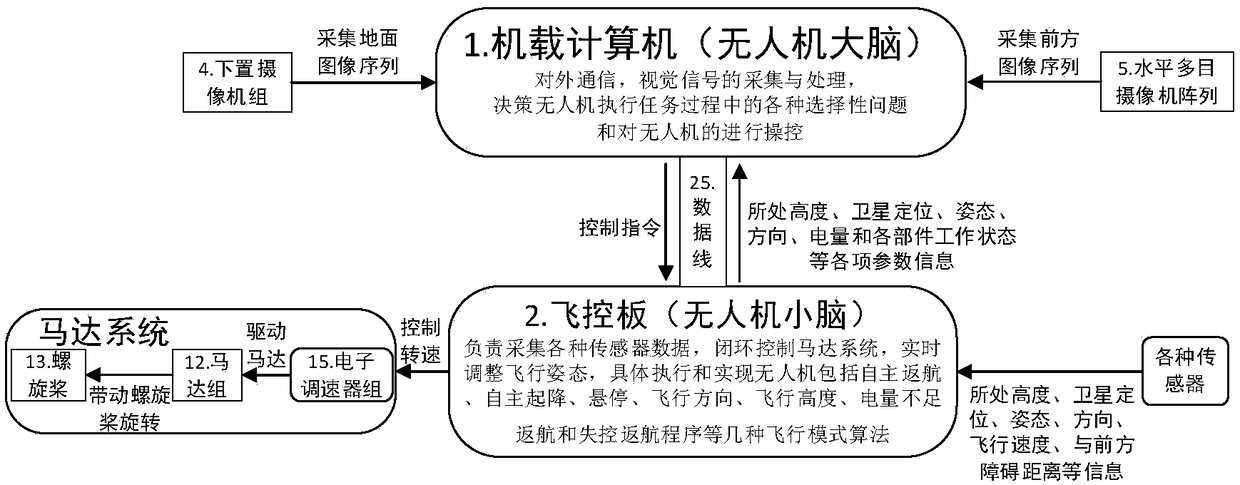
[0074] S1. The flight control board collects the real-time flight state parameter information of the UAV and sends it to the onboard computer. The flight state parameter information includes the current altitude information, the distance information between the obstacle in front and the UAV, and the current position. Several combinations or all of position information, attitude information, direction information, speed and acceleration information, power information and working status information of each component;
[0075] S2. The onboard computer collects visual signals including the ground image sequence and the front image sequence in real time, receives the real-time flight status parameter information sent by the flight control board, and communicates with the outside world in real time through the communication module;
[0076] S3. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More