

Hydraulic-driven biped robot lower limb mechanism
A bipedal robot and hydraulic technology, applied in the field of robotics, can solve problems such as slow movement speed, difficulty adapting to complex terrain, insufficient explosive force, etc., and achieve the effects of strong load capacity, space saving, and stroke saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
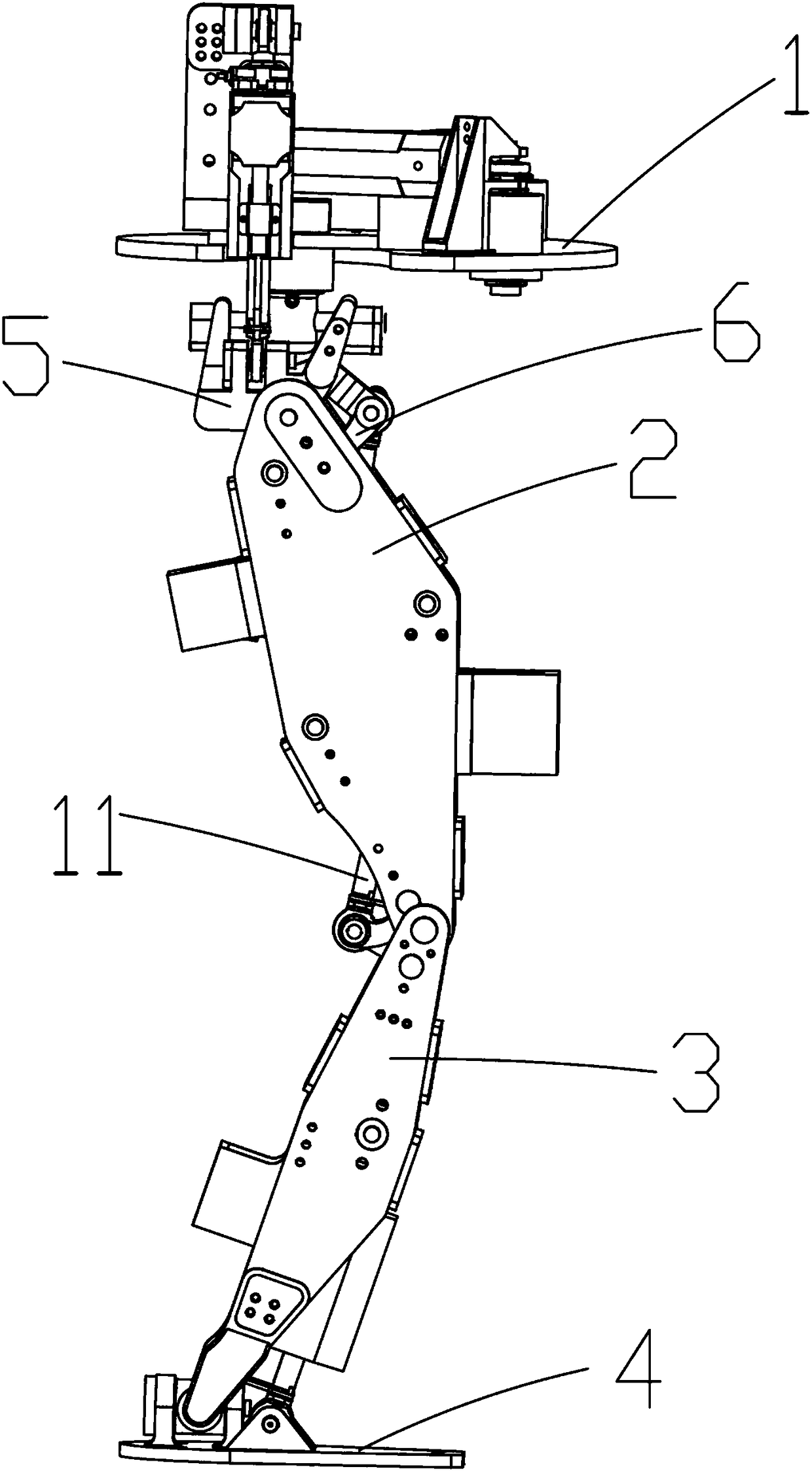
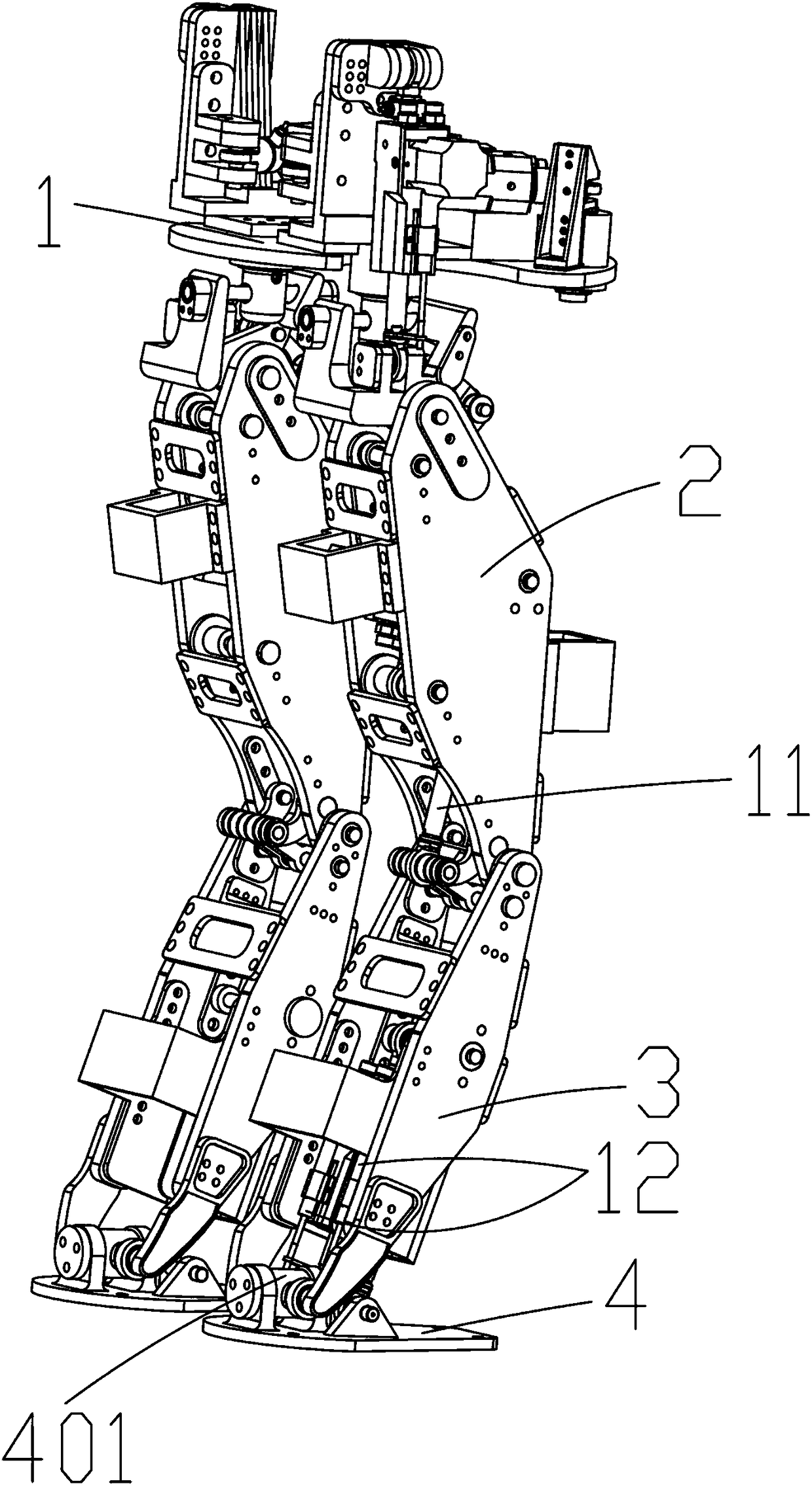
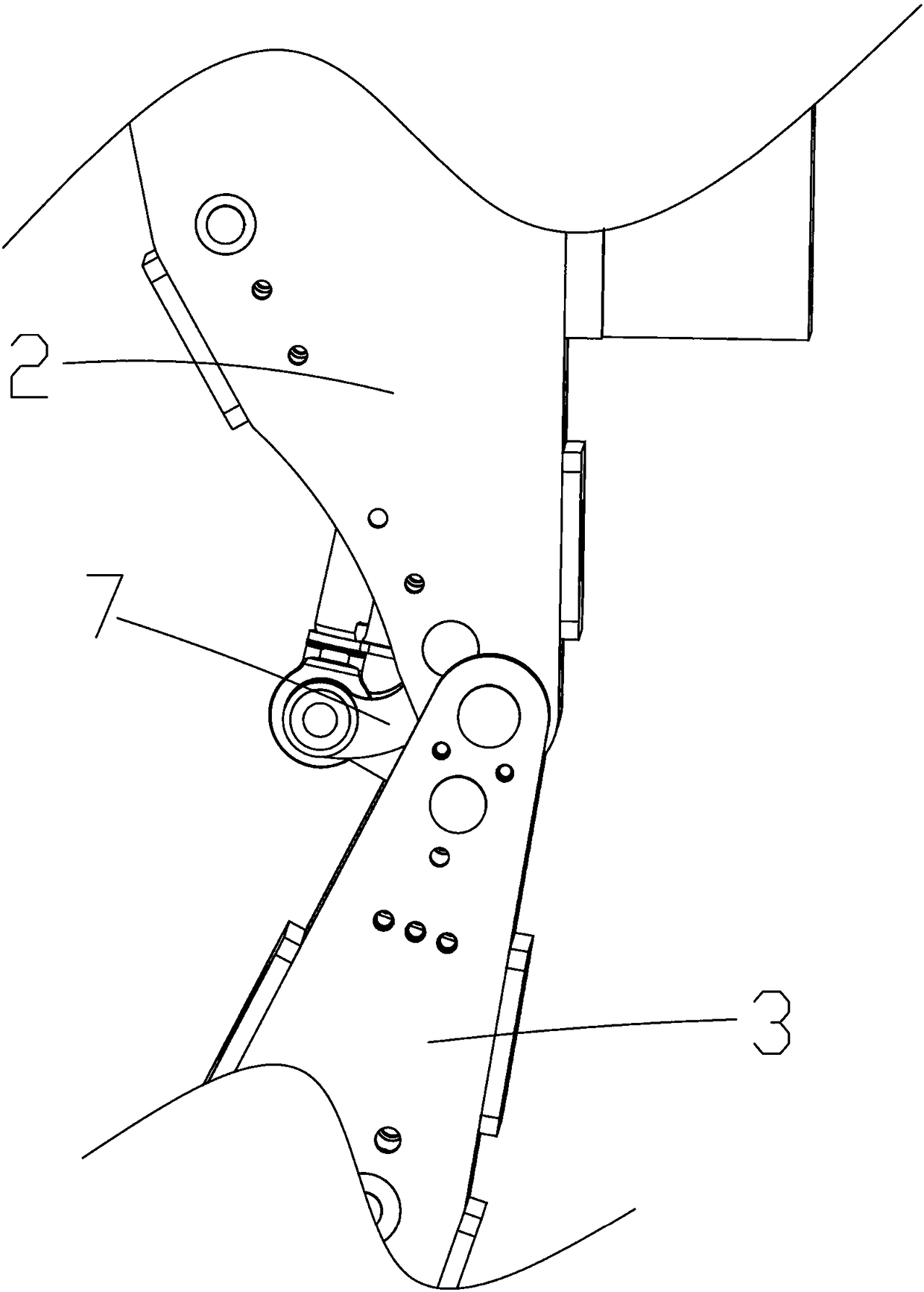
[0018] see Figure 1-4 , the present invention provides a technical solution: a hydraulically driven biped robot lower limb mechanism, including a trunk 1, a left leg and a right leg, the left leg and the right leg have the same structure and are symmetrically installed under the trunk 1, and the left leg includes Foot 4, ankle joint component, calf 3, knee joint component, thigh 2 and hip joint component, the upper end of thigh 2 is connected to torso 1 throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More