Mobile robot path planning method based on ant colony improvement and peak smoothing
A mobile robot and peak smoothing technology, applied in navigation computing tools and other directions, can solve problems such as slow solution speed, energy loss, easy to fall into local optimal solution, etc., achieve the effect of smooth path corners and reduce energy loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
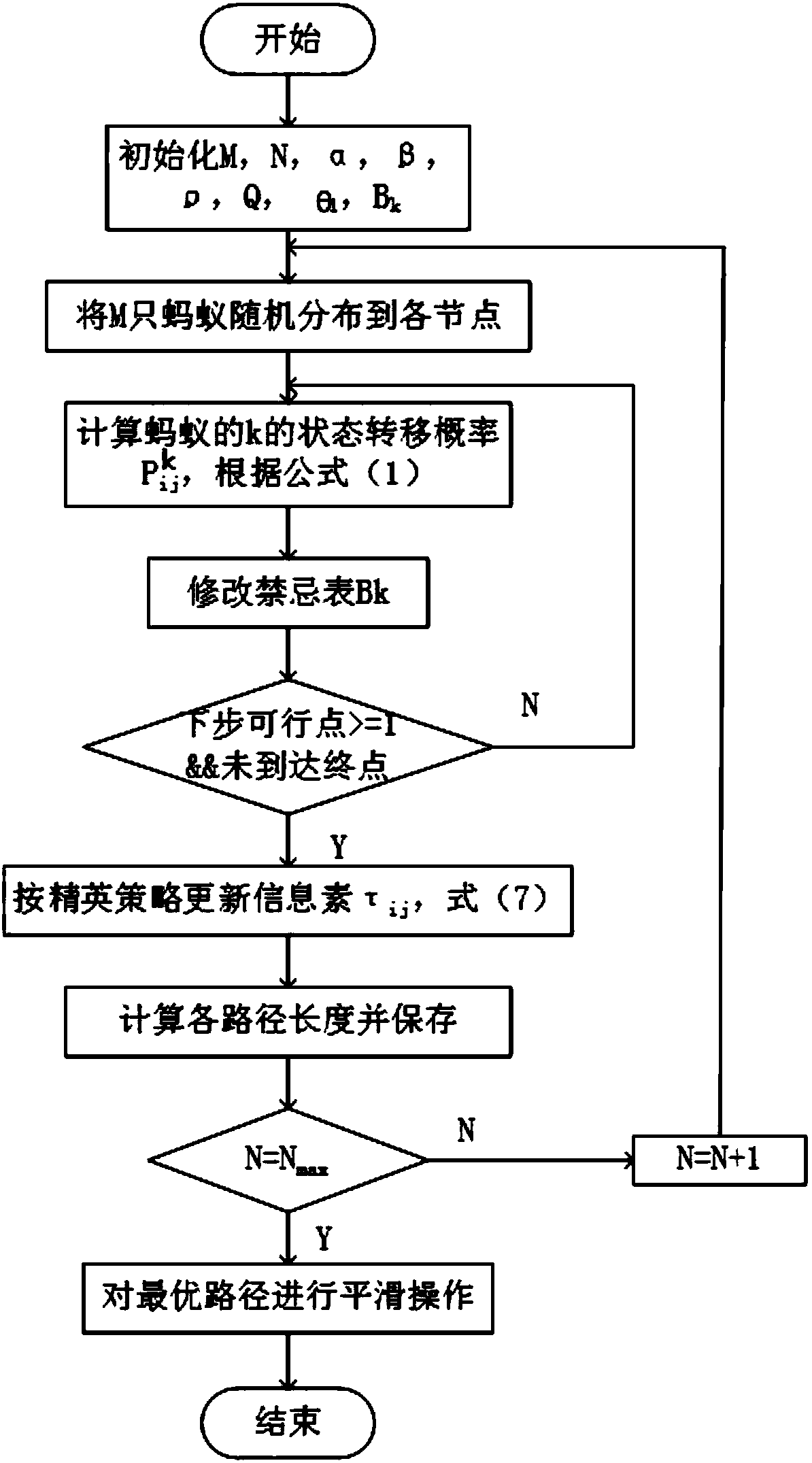
[0028] Embodiment 1: as Figure 1-8 As shown, a mobile robot path planning method based on ant colony improvement and peak smoothing, the method steps are as follows:
[0029] S1. Using the grid method to model the environment of the mobile robot's operating space;
[0030] S2. Set parameters, initialize the number of ants M, the number of iterations N, the starting point and the ending point of ants, the heuristic factor α, the expected heuristic factor β, the pheromone volatilization coefficient ρ, the pheromone increase intensity coefficient Q, and the expected deflection angle θ 1 , taboo list B k initialization;
[0031] S3, M ants start from the initial point;
[0032] S4. Ant individual k according to the state transition probability The formula transfers from grid i to adjacent grid j with the maximum transition probability;
[0033] S5. Every time ant individual k is transferred, grid j is added to taboo table B k ;
[0034] S6. Update the formula τ according ...
Embodiment 2
[0041] Embodiment 2: as Figure 1-8 As shown, a mobile robot path planning method based on ant colony improvement and peak smoothing, the method steps are as follows:
[0042] Step 1. Use the grid method to model the environment of the mobile robot's operating space, such as figure 2 As shown, 1 in the matrix means black grids represent obstacles, 0 means white grids represent freely passable grids, and the working environment of the robot is divided into 20×20 and 17×17 grids;
[0043] Step 2: Initialize parameters, the number of ants M is 50, the number of iterations N is 200, the heuristic factor α is 1, the expected heuristic factor β is 7, the pheromone evaporation coefficient ρ is 0.7, the pheromone increase intensity coefficient Q is 1, the robot The starting point coordinates are (0.5,16.5), the ending point coordinates are (16.5,0.5), and the expected deflection angle θ 1 155°, taboo table B k initialization;
[0044] Step 3, M ants start from the initial point; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com