

Online identifying and control method of unmanned aerial vehicle
A control method and UAV technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system and other directions, can solve problems such as inability to perform online identification, inability to accurately control UAVs, etc. The effect of low energy consumption, reduced energy consumption, and improved stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0047] Such as figure 1 As shown, the UAV online identification control system includes a ground control station, a cloud server, a UAV body and a flight controller set on the UAV body. The flight controller controls the flight of the UAV, and the flight controller communicates wirelessly The module communicates with the cloud server and the ground control station; the ground control station can monitor the status of the drone in real time;
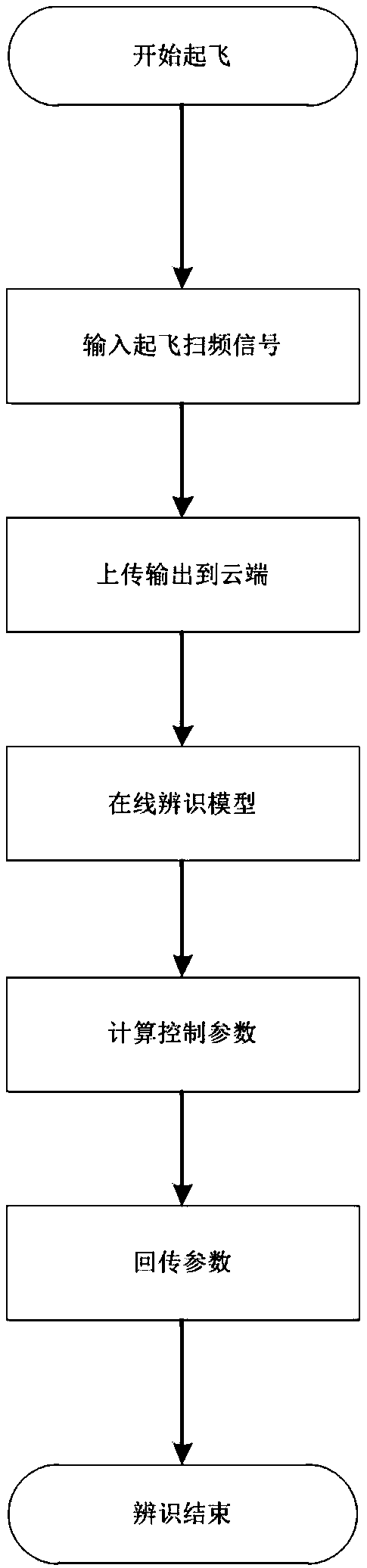
[0048] Such as figure 2 As shown, during the take-off process, the ground control station outputs the sweep signal when the UAV takes off, and the sweep signal is input to the roll and pitch channels. Considering that the interference in the take-off stage is small, the sweep signal can be frequency 0.5Hz, a sinusoidal signal with an amplitude of 50. The normal remote control signal is between -100 and +100. The UAV receives this frequency sweep signal and responds to take off. At the same time, the acquisition device on the UAV body C...
Embodiment 2
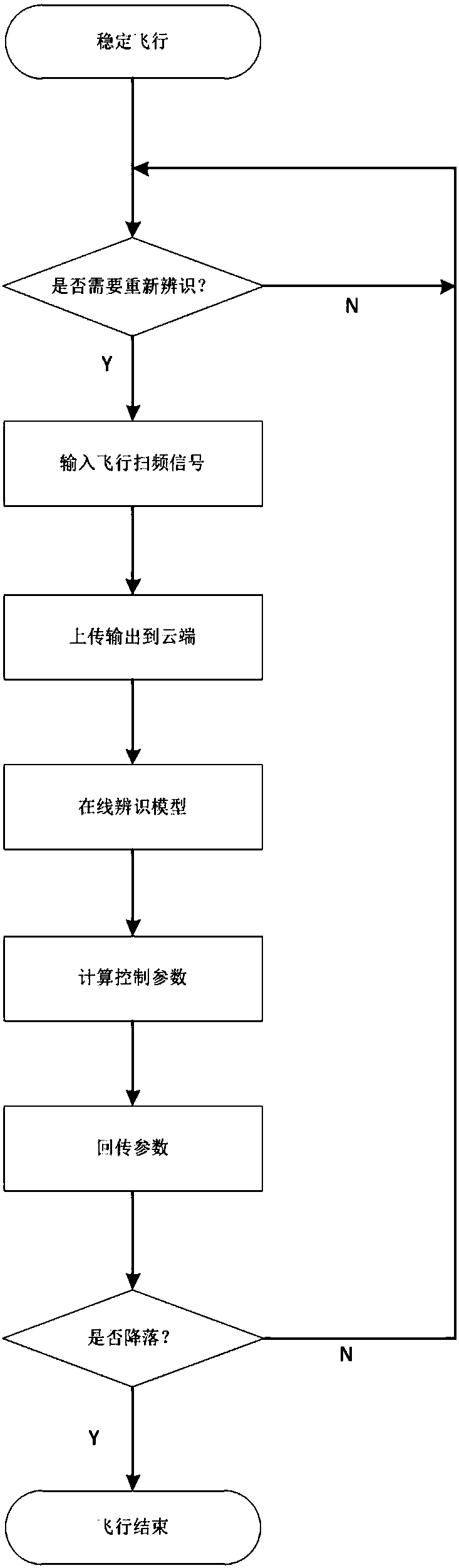
[0056] Such as image 3 As shown, during the stable flight of the UAV, the flight controller will detect whether the mathematical model has changed every 3 minutes. It has the characteristics of wind disturbance, high control frequency and small control range. Input a frequency in the roll and pitch channels respectively. 20Hz, a sinusoidal excitation signal with an amplitude of 10, and then compare the output signal calculated by the model with the actual response data collected. If the error exceeds 15%, it is considered that the model has changed:
[0057] 1) When the model does not change, the UAV is controlled to continue flying with the parameters corresponding to the current model;
[0058] 2) When the model changes, the ground control station outputs the corresponding frequency sweep signal according to the current state of the UAV. The frequency sweep signal in the stable flight phase is based on the characteristics of stable flight with many wind disturbances, high c...
Embodiment 3
[0064] Such as Figure 4 As shown, the UAV receives a landing command from the ground control station during the flight, and when the landing information is confirmed, the ground control station outputs a frequency sweep signal for the UAV landing according to the characteristics of the landing. When landing, the attitude stability requirements and the control frequency are relatively high. The sinusoidal signal with a frequency of 200Hz and an amplitude of 5 is used as the excitation signal for online identification. The response data of the machine is collected, and then transmitted to the cloud server through the wireless communication module;
[0065] The cloud server uses FFT combined with the windowing method to analyze the data in the frequency domain to obtain the frequency domain response and coherent spectrum of the system, and obtain the mathematical model of the unmanned landing stage. This mathematical model is a second-order model, using the genetic algorithm Es...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More