

Improved S curve acceleration and deceleration control method based on trigonometric function
A technology of acceleration and deceleration control and trigonometric functions, applied in digital control, program control, electrical program control, etc., can solve problems such as vibration and noise, short time consumption, and system vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
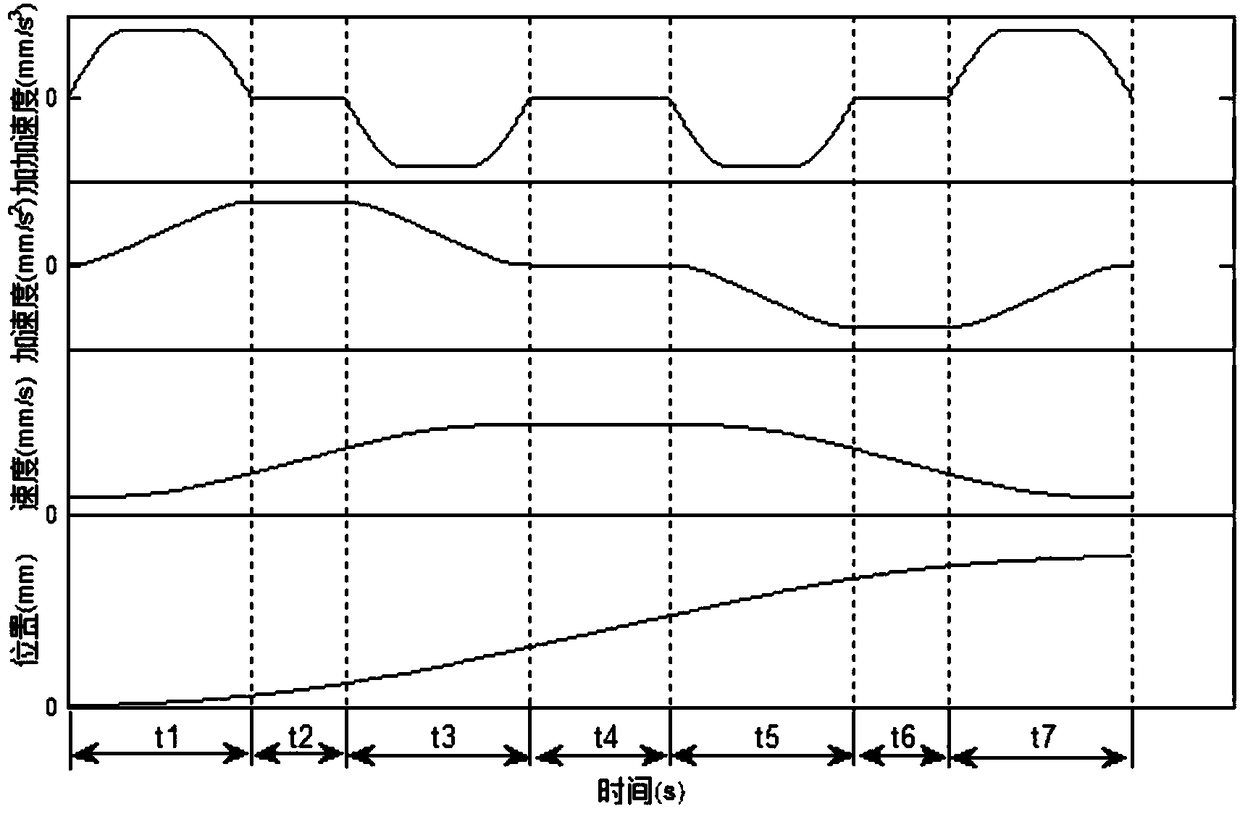
[0185] Such as figure 1 As shown, the improved S-curve acceleration and deceleration control method based on trigonometric functions has a 7-segment structure, namely: acceleration and acceleration section L 1 , Uniform acceleration section L 2 , Decrease acceleration section L 3 , Uniform speed section L 4 , Acceleration and deceleration section L 5 , Uniform deceleration section L 6 And deceleration section L 7 . Corresponding to these 7 movement stages, the total movement time T is also divided into 7 parts, namely the acceleration time t 1 (Set to Δt 1 ), uniform acceleration period time t 2 -t 1 (Set to Δt 2 ), deceleration time t 3 -t 2 (Set to Δt 3 ), uniform speed period time t 4 -t 3 (Set to Δt 4 ), acceleration and deceleration time t 5 -t 4 (Set to Δt 5 ), uniform deceleration period time t 6 -t 5 (Set to Δt 6 ) And deceleration period time t 7 -t 6 (Set to Δt 7 ), where t i (i=1,2...,7) is the moment of the transition point of each stage, Δt i (i=1,2...,7) is the time...
experiment example 1
[0334] Using the control method described in Example 1, programming with C++ and putting in the MATLAB optimization algorithm to obtain the corresponding image.
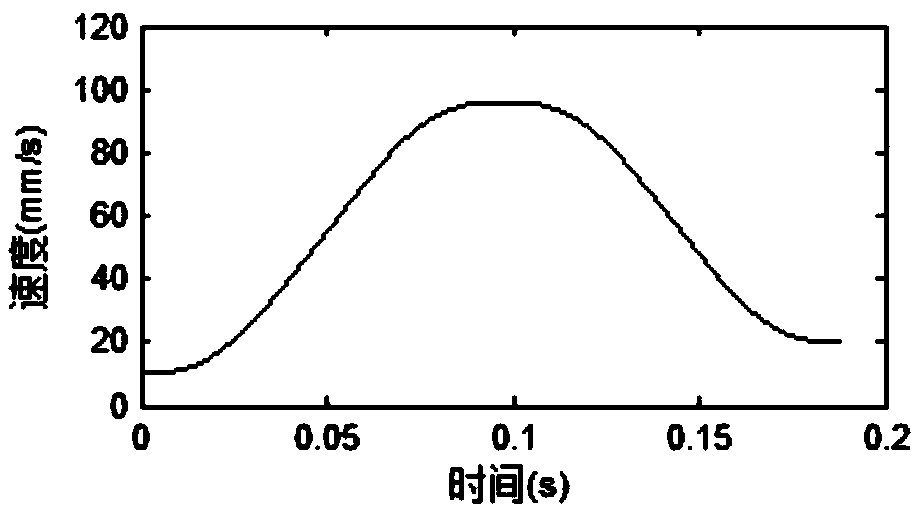
[0335] This experimental example does not include the uniform speed section. The data in Table 2 is set as follows.
[0336] Table 2
[0337] Initial parameters
[0338] After running in MATLAB, the corresponding figure 2 As shown in the table, after the operation is completed, the displacement is set, and the figure 2 It can be seen that the speed of the whole process is smooth.
experiment example 2
[0340] Using the control method described in Example 1, programming with C++ and putting in the MATLAB optimization algorithm to obtain the corresponding image.
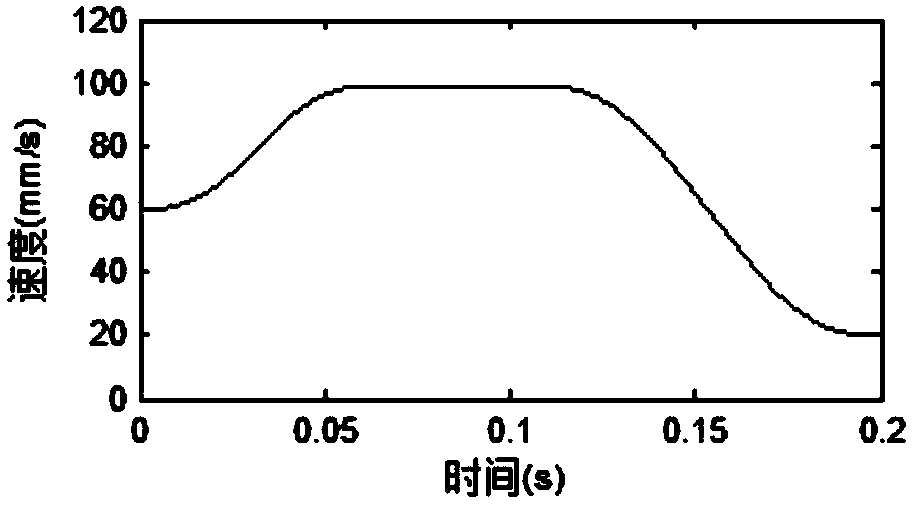
[0341] This experimental example is the case where the uniform acceleration section is not included, and the data in Table 3 is set as follows.
[0342] table 3
[0343] Initial parameters
[0344] After running in MATLAB, the corresponding image 3 As shown in the table, after the operation is completed, the displacement is set, and the image 3 It can be seen that the speed of the whole process is smooth.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More