

Automated guided vehicle, control method thereof, and control system thereof
A technology of automatic guidance and control methods, applied in the direction of control/regulation system, non-electric variable control, vehicle position/route/height control, etc., which can solve the problem of difficult model establishment, insufficient robustness, and difficult changes in motion characteristics Online adjustment and other issues to achieve the effect of increasing operating speed, increasing computing speed, and high operating speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
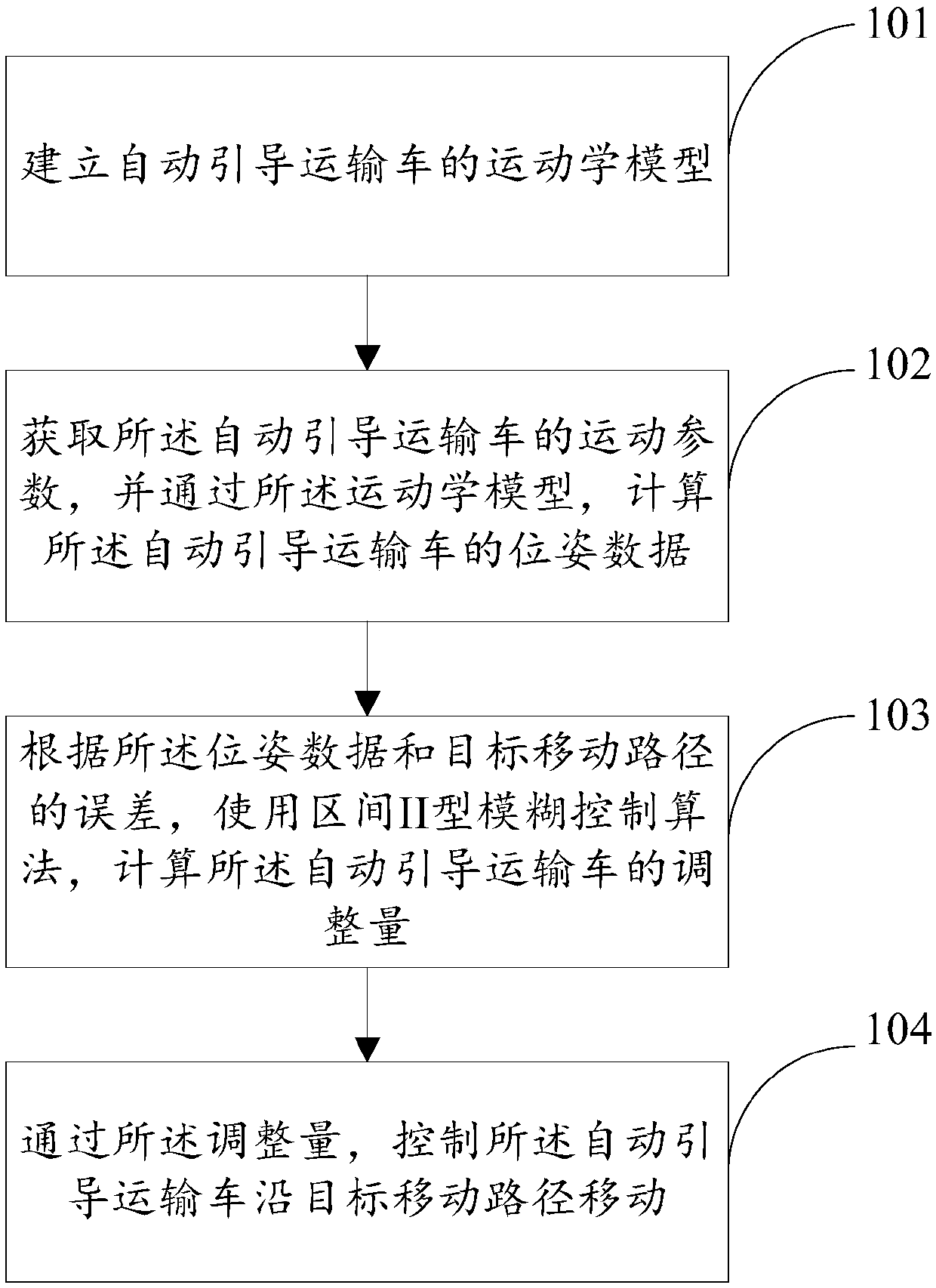
[0027] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative efforts fall within the protection scope of the present invention.
[0028] Fuzzy control is a control strategy based on fuzzy set theory, fuzzy language variables and fuzzy logic reasoning. It is essentially a nonlinear control. The existing fuzzy control algorithm has been successfully applied in some practical applications. Because it does not need to determine the precise description of the controlled system, it can be used in some complex systems that cannot be described accurately.
[0029] During the operation and use of the automatic gu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More