

Progressive rehabilitation training method based on exoskeleton robot
An exoskeleton robot and rehabilitation training technology, which can be used in muscle training equipment, gymnastics equipment, passive exercise equipment, etc., can solve problems such as the inability to meet the rehabilitation needs of patients with limb dysfunction, and achieve the effect of enhancing mobility and improving blood circulation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
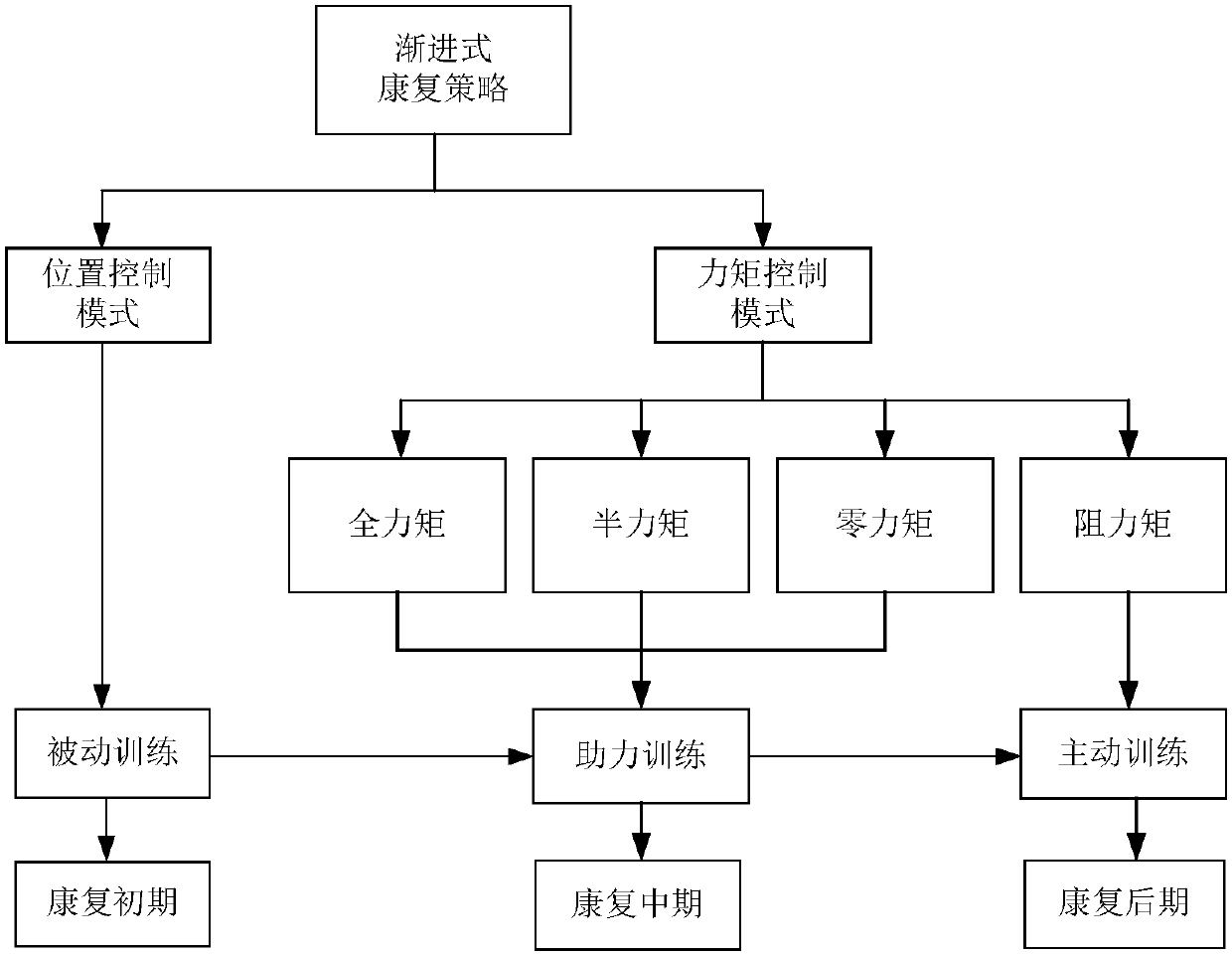
[0023] see Figure 1-Figure 3 As shown, a progressive rehabilitation training method based on exoskeleton robot is divided into position control mode and torque control mode according to different rehabilitation periods.
[0024] According to the different rehabilitation periods, it is divided into position control mode training in the early stage of rehabilitation and torque control mode training in the middle and late stages of rehabilitation.
[0025] The position control mode training at the initial stage of rehabilitation is passive training based on trajectory traction. One or both limbs of the patient are bound to the exoskeleton robot, and the initial passive rehabilitation training is performed completely under the traction of the exoskeleton robot;
[0026] Torque control mode training in the middle and late stage of rehabilitation is to u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More