

Method for accurately positioning puncture surgical robots on basis of electromagnetic positioning systems
A surgical robot, electromagnetic positioning technology, applied in surgical manipulators, surgical robots, surgery and other directions, can solve the problems of low positioning accuracy, large amount of calculation, many sampling points, etc., to improve positioning accuracy, reduce registration error, calculate fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
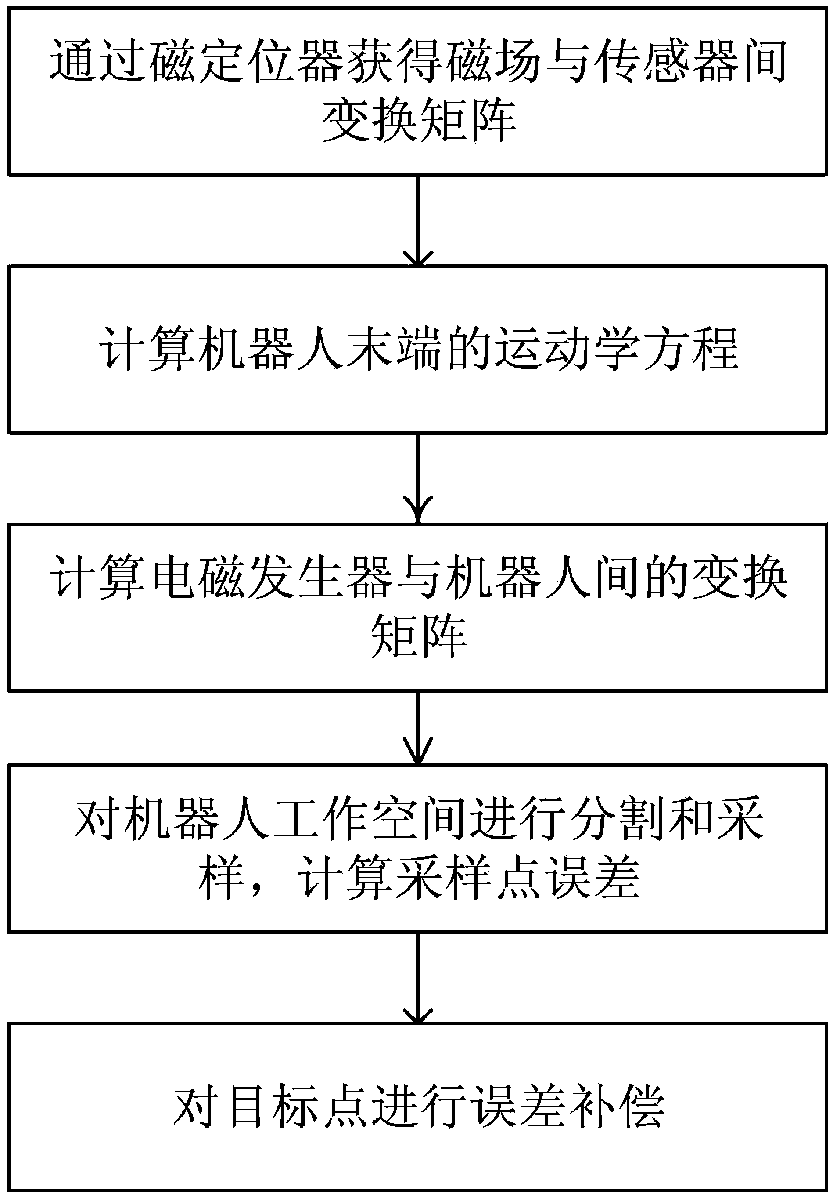
[0023] See attached figure 1 , the method of the present invention comprises the following steps: obtain the transformation matrix between the magnetic field and the sensor through the magnetic locator; calculate the kinematic equation at the end of the robot; calculate the transformation matrix between the electromagnetic generator and the robot; divide and sample the robot workspace, and calculate the sampling Point error; perform error compensation on the target point.
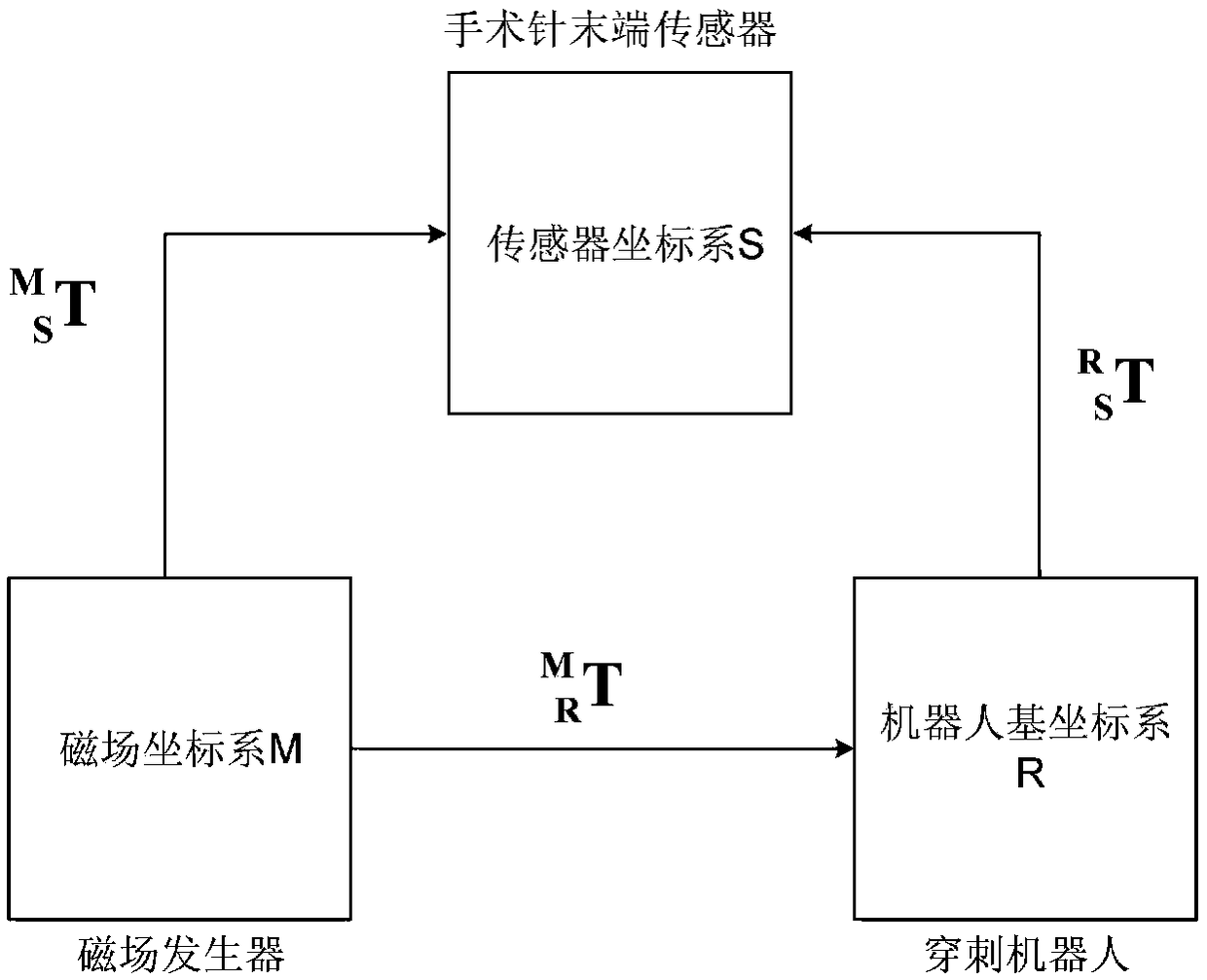
[0024] See also attached figure 2 , the specific steps of the method are as follows:
[0025] (1) Establish a sensor coordinate system that coincides with the coordinate system of the surgical needle end through the information of the sensor at the end of the surgical needle, and calculate the transformation matrix between the coordinate system of the puncture surgery robot and the sensor coordinate system
[0026] (2) According to the kinematic equation of the robot, the transformation matrix between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More