

Multi-vehicle collaborative mapping method applied to automatic driving
An automatic driving and map technology, which is applied to road network navigators and other directions, can solve the problems of poor accuracy of single vehicles, large amount of calculation, and reduced map accuracy, achieve good robustness and robustness, realize collaborative positioning, and improve The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The accompanying drawings are for illustrative purposes only, and should not be construed as limitations on this patent; in order to better illustrate this embodiment, certain components in the accompanying drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art It is understandable that some well-known structures and descriptions thereof may be omitted in the drawings. The positional relationship described in the drawings is for illustrative purposes only, and should not be construed as a limitation on this patent.
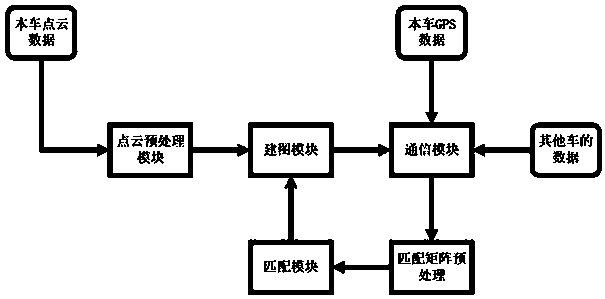
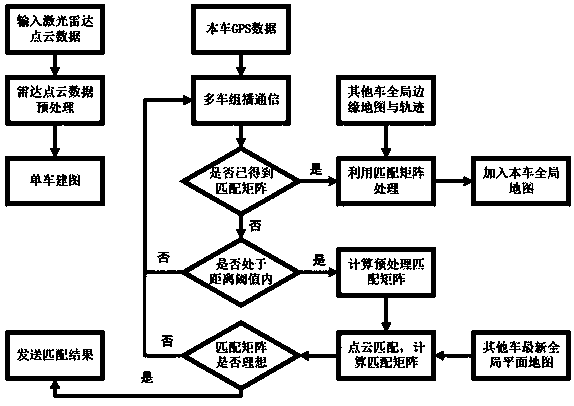
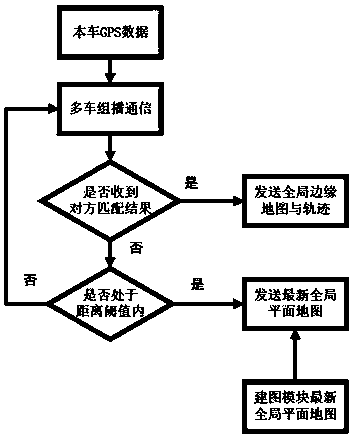
[0037] like figure 1 as shown, figure 1It is the data flow process of the algorithm: the point cloud data collected by the lidar and the input data stream collected by the GPS receiver are: the point cloud data of the vehicle, the GPS data of the vehicle and the data from other vehicles. Data from other cars includes real-time GPS of other cars, a certain frame of the global planar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More