

A multi-vehicle collaborative mapping method for autonomous driving
An automatic driving and map technology, applied in directions such as road network navigators, can solve problems such as poor single-vehicle accuracy, reduced map accuracy, and high CPU requirements, achieve good robustness and robustness, improve accuracy, detect Great field of view
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The accompanying drawings are for illustrative purposes only, and should not be construed as limitations on this patent; in order to better illustrate this embodiment, certain components in the accompanying drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art It is understandable that some well-known structures and descriptions thereof may be omitted in the drawings. The positional relationship described in the drawings is for illustrative purposes only, and should not be construed as a limitation on this patent.
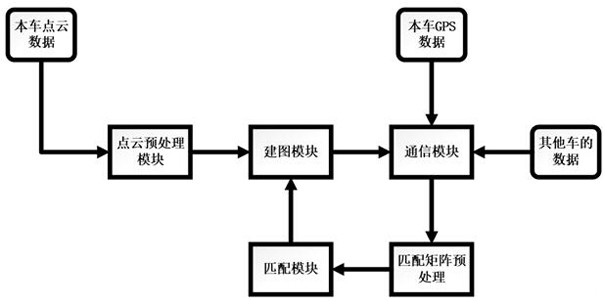
[0037] like figure 1 as shown, figure 1It is the data flow process of the algorithm: the point cloud data collected by the lidar and the input data stream collected by the GPS receiver are: the point cloud data of the vehicle, the GPS data of the vehicle and the data from other vehicles. Data from other cars includes real-time GPS of other cars, a certain frame of the global planar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More