

Vibration feedback and force feedback combined man-machine interaction finger, glove and method
A vibration feedback and human-computer interaction technology, applied in the field of human-computer interaction wear, can solve the problems of inconvenient wearing, the influence of hand opening and closing, and the accuracy of influence feedback, so as to achieve easy control of rope variation, reduce resonance interference, The effect of a significant change in amplitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
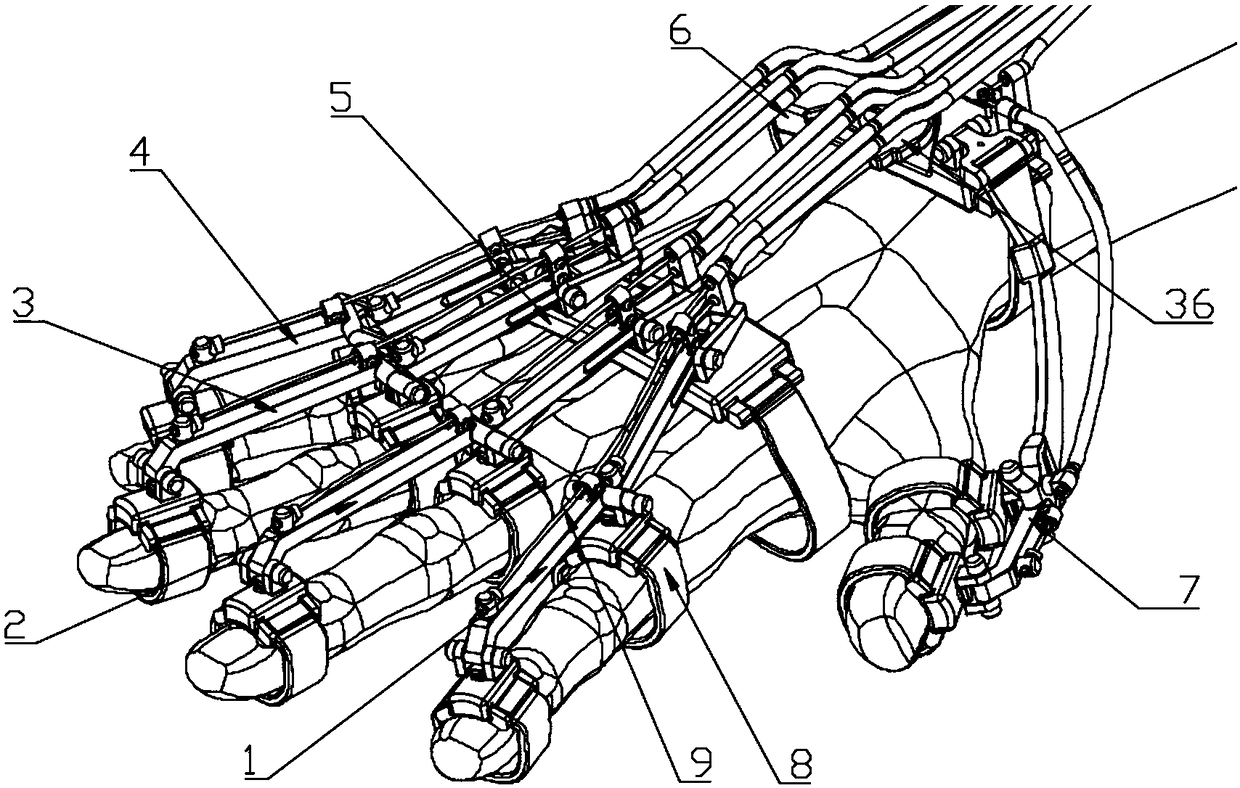
[0052] The accompanying drawings disclose a schematic structural view of the device involved in the present invention without limitation, and the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0053] see figure 1 As shown, a data glove mechanism combining vibration feedback and force feedback is provided. Including the double-link finger mechanism 1 on the index finger; the double-link finger mechanism 2 on the middle finger; the double-link finger mechanism 3 on the ring finger; the double-link finger mechanism 4 on the little finger; the wrist fixing plate 5; the back of the hand fixing plate 6 ; Single link finger mechanism 7 on the thumb; Vibration feedback mechanism 8; Rope driving force feedback mechanism 9; The back of the hand fixing plate 5 and the wrist fixing plate 6 are all closely fitted with the hands by the flexible fixing band 19.
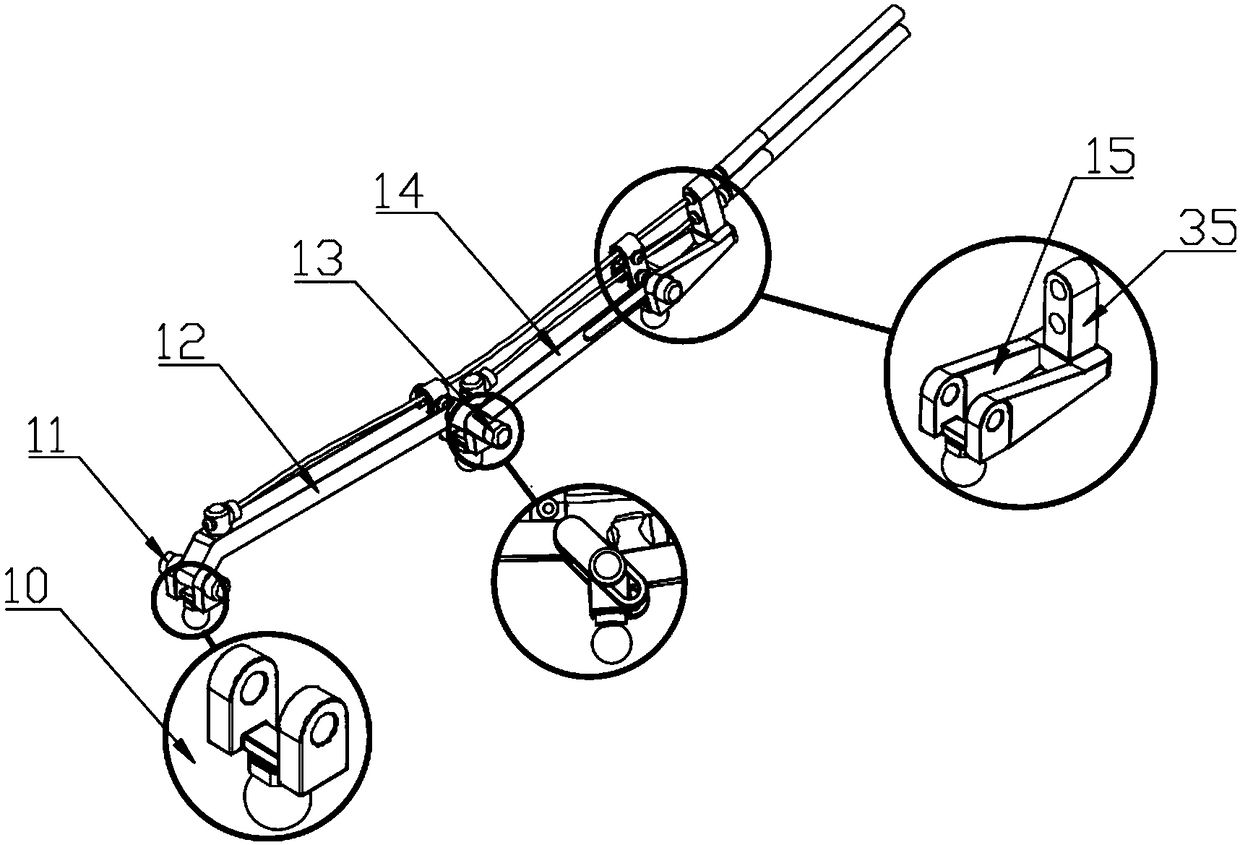
[0054] refer to figure 2 Shown is the schemat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More