

Distributed sensor network cooperative target estimation and interference source passive-positioning method
A distributed sensor and network collaboration technology, applied in transmission monitoring, transmission system, wireless communication, etc., can solve the problem that the wireless sensor network is vulnerable to attacks, and achieve the effect of strong anti-interference ability and good filtering effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] The research of this project will be based on the principle of moving from simple to difficult, rationally decomposing the research sub-problems, and gradually advancing the research progress. The arrangement of the research content of this project is also based on the principle of advancing from simple to difficult and advancing layer by layer. Therefore, in the arrangement of the research technology route, we will first study the distributed cooperative stationary target positioning of the network multi-agent system based on angle measurement information in two-dimensional space and three-dimensional space, and then study the network multi-agent system in two-dimensional space and three-dimensional space Distributed cooperative moving target localization based on angle measurement information. The arrangement of experimental research will be carried out at the same time as the progress of theoretical analysis. The research ideas of each detail are as follows:
[002...
Embodiment 2
[0044] According to whether the agent is mobile or not, it can be divided into the localization problem of static network and the localization problem of dynamic network. For a static network of agents, where the agent cannot move (such as a sensor network, where sensor nodes typically remain stationary once deployed), the agent typically utilizes certain relative measurements, including distance, azimuth, received signal strength, signal arrival time difference , hop count information, etc. The autonomous agent uses some of the measurements or a combination of several kinds of information to realize the positioning of the unknown target. In fact, many of these measurements are directly or indirectly related to distance, and distance information can be calculated from information such as received signal strength, signal arrival time difference, and signal arrival angle. We call the process of obtaining a distance measurement using information such as signal strength, time dif...
Embodiment 3
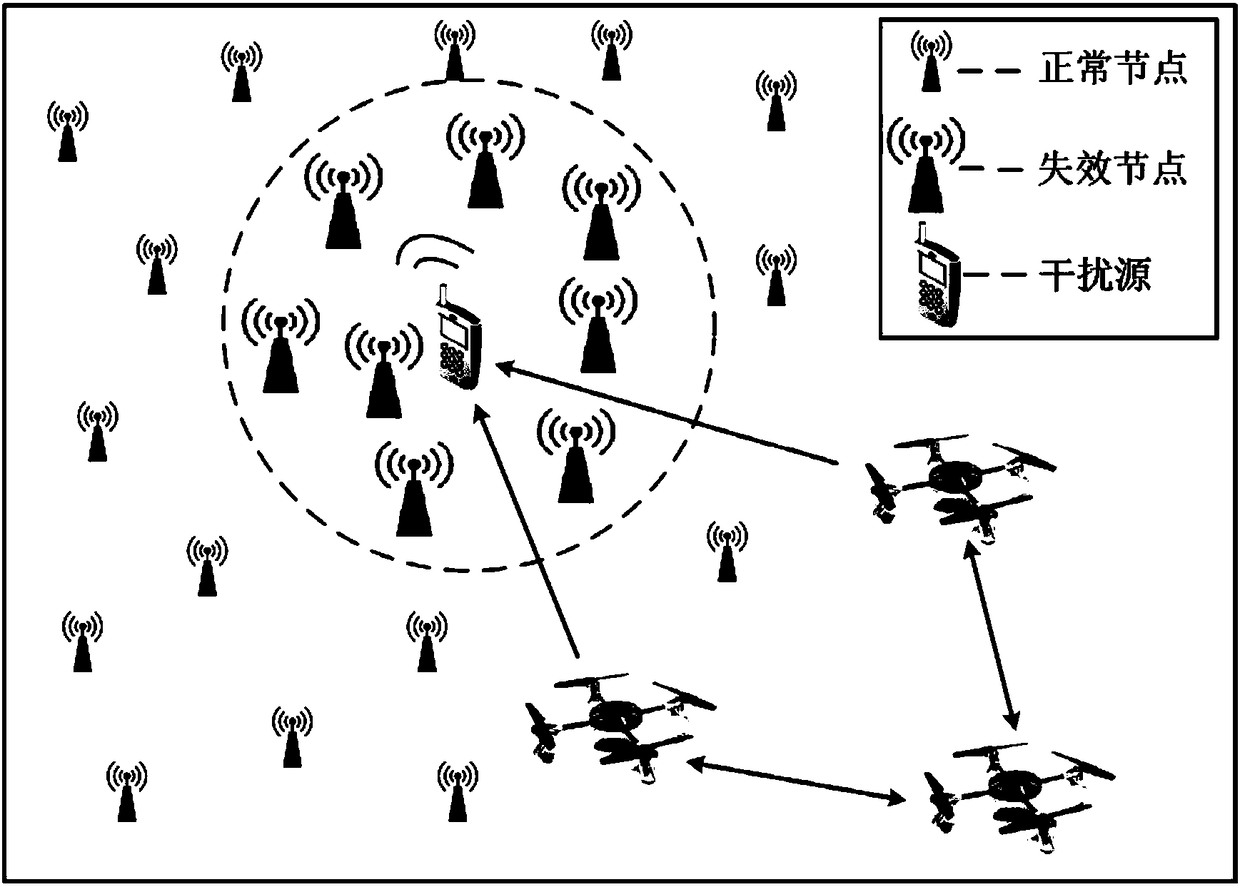
[0052] The invention mainly studies the target positioning algorithm of the network multi-autonomous subject system in the two-dimensional and three-dimensional space and the application in the positioning of malicious interference sources in the sensor network. The individuals of the networked multi-agent system refer to ground mobile robots (two-dimensional space) and quadrotor aircraft (three-dimensional space). Each individual is equipped with sensors and wireless communication equipment, and has the ability to move, perceive, calculate and communicate. Its main problem is to design a distributed nonlinear state observer, so that each agent can only use the angle measurement and information interaction between neighboring individuals and the angle of an unknown target of interest (interference source in the sensor network) measurement to dynamically estimate the relative coordinates of the target relative to the agent.
[0053] Depending on the actual application scenario...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More