

Gravity matching method based on self-adaptive robust untracked Kalman filtering
An unscented Kalman, self-adaptive robust technology, applied in the fields of navigation, guidance and control, can solve the problems of filter divergence and filter effect decline, and achieve the goal of improving robustness, reducing reliability and improving real-time performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below with reference to the accompanying drawings and examples.
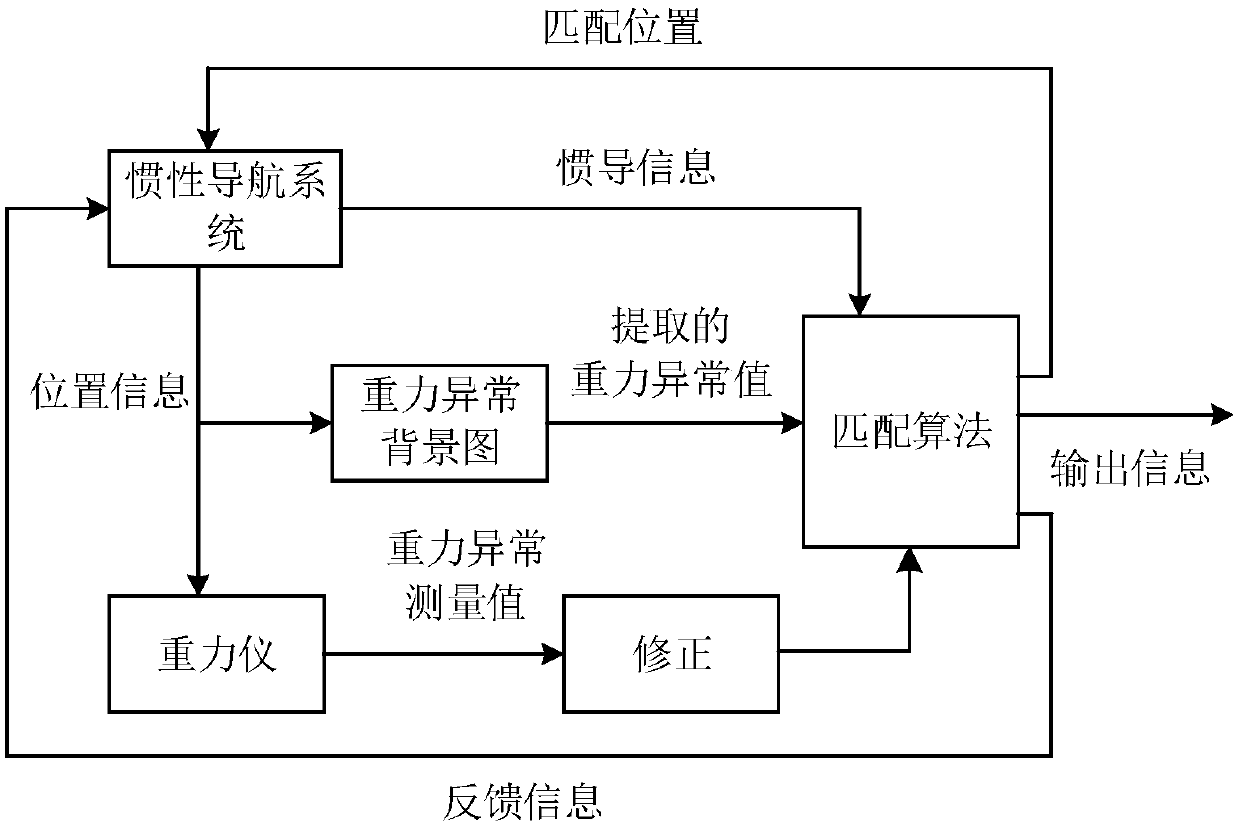
[0033] The invention provides a gravity matching method based on the adaptive robust unscented Kalman filter (ARUKF), which enhances the robustness of the system by introducing an adaptive factor and a robust Huber function, so that the system has no noise in the system process In the case of strong certainty and pollution of observation noise, high matching accuracy can still be obtained. The system block diagram is as follows: figure 1 shown.
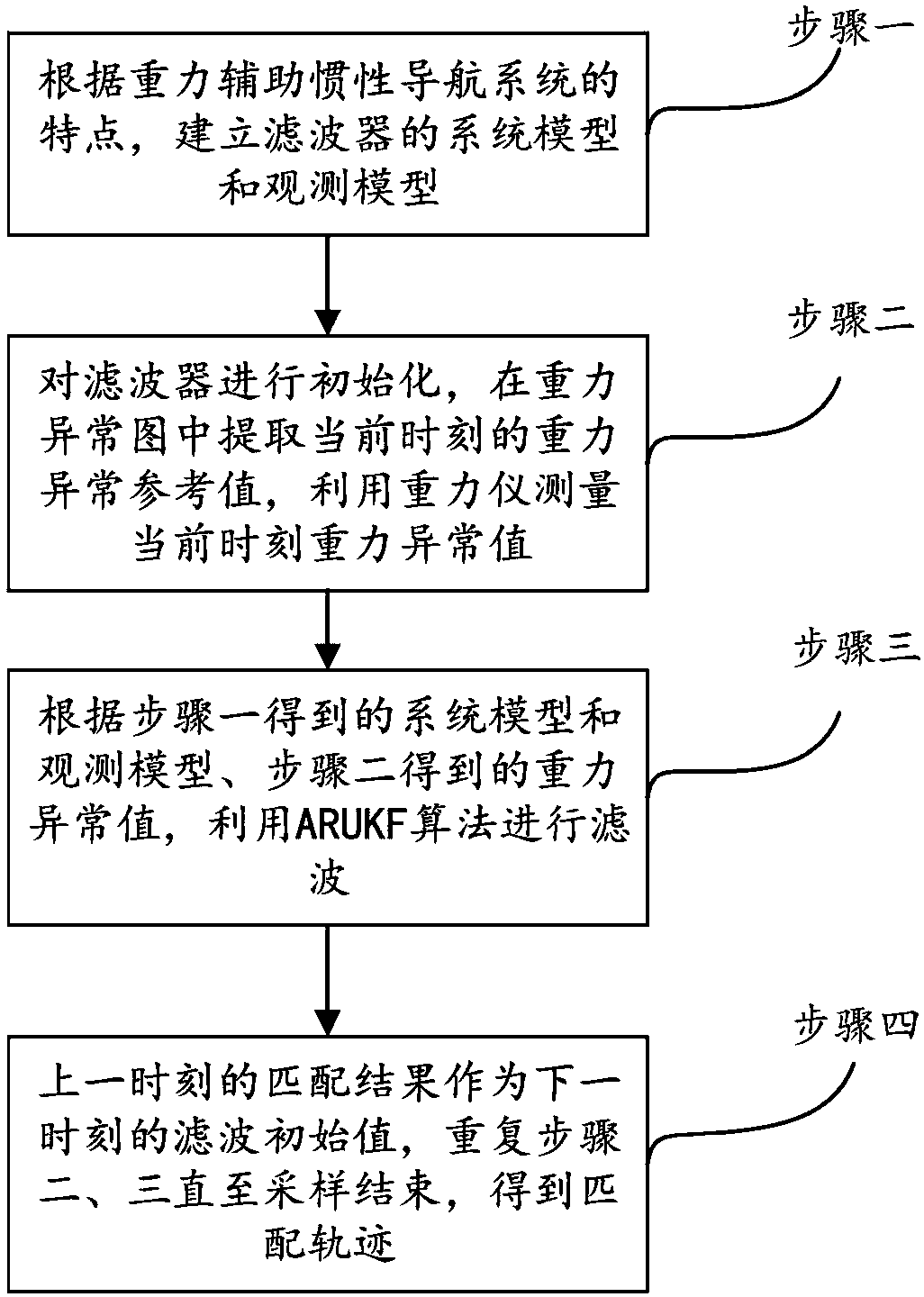
[0034] The specific flow chart is as figure 2 shown, including the following steps:
[0035] Step 1, using the single-point matching algorithm based on recursive filtering, according to the characteristics of the gravity-assisted inertial navigation system, the inertial navigation error model is used as the state model of the filter, taking is the system state, where and δλ denote the latitude and longitude...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More