

Opencv-image-processing-based quadrotor aircraft midair autonomous grabbing operation control method
A four-rotor aircraft and image processing technology, which is applied in the direction of unmanned aircraft, aircraft, rotorcraft, etc., can solve the problems of obtaining accurate position information, the difficulty of unmanned aerial vehicles, and the limitation of the application range of quadrotor aircraft.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0058] The present invention provides a control method based on Opencv image processing for four-rotor aircraft autonomous grabbing operations in the air, which broadens the application field of four-rotor aircraft, and can perform air operations indoors and outdoors in dense surrounding buildings, improving Aerial work accuracy.
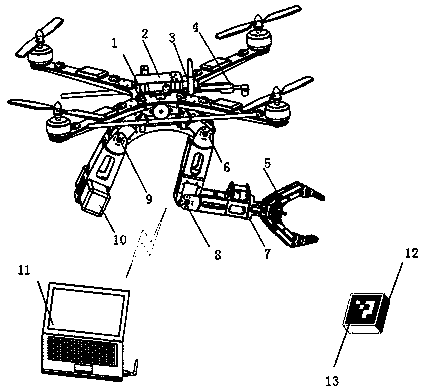
[0059] Such as figure 1 As shown, the system implementation platform of the present invention mainly consists of a quadrotor aircraft 1, a flight controller 2, a wireless communication module, a steering gear controller 3, a camera 4, and a three-degree-of-freedom mechanical arm including a manipulator 5, a joint one 6, and a joint three 7 , joint two 8, center of gravity balance joint 9, battery 10, PC 11, captured target 12 and artificial sign 13 form. The working device includes a three-degree-of-freedom robot a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More