

Industrial Robot Grippers and Industrial Robots
An industrial robot and gripper technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of limited gripping range, complex structure and control, and high cost, achieve a wide gripping range, and overcome the limited gripping range. , the effect of strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following is further described in detail through specific implementation methods:
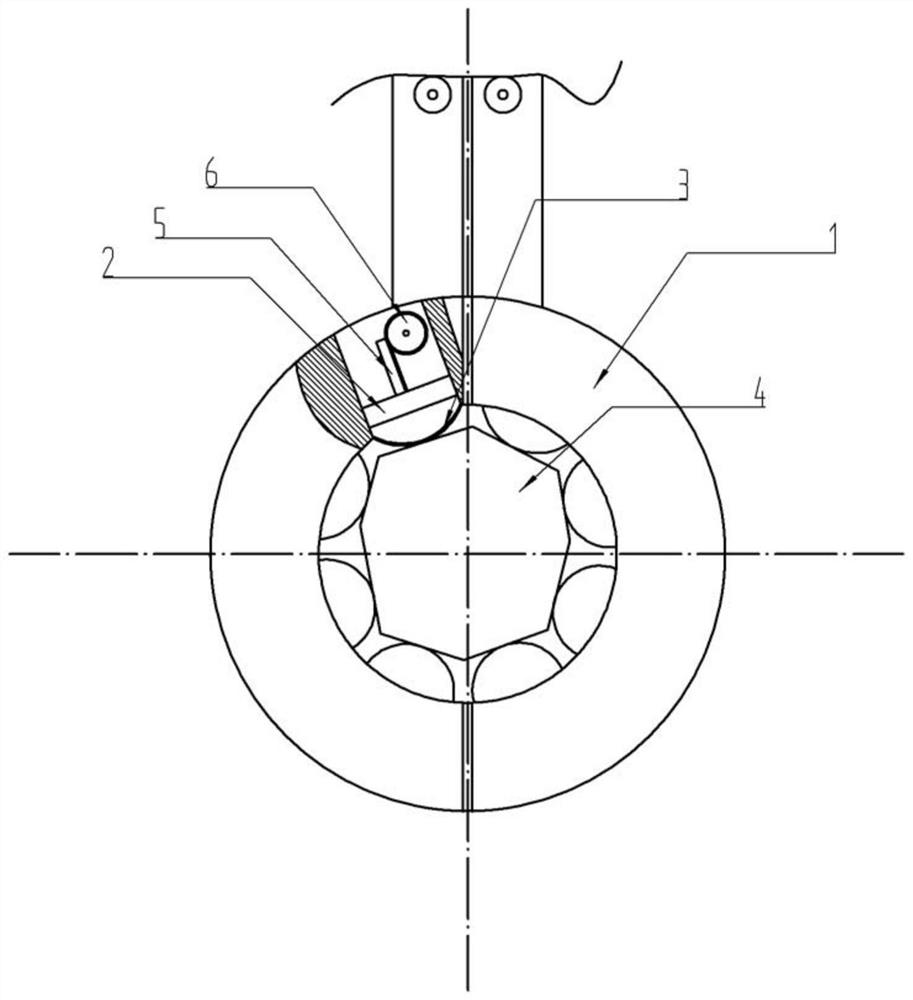
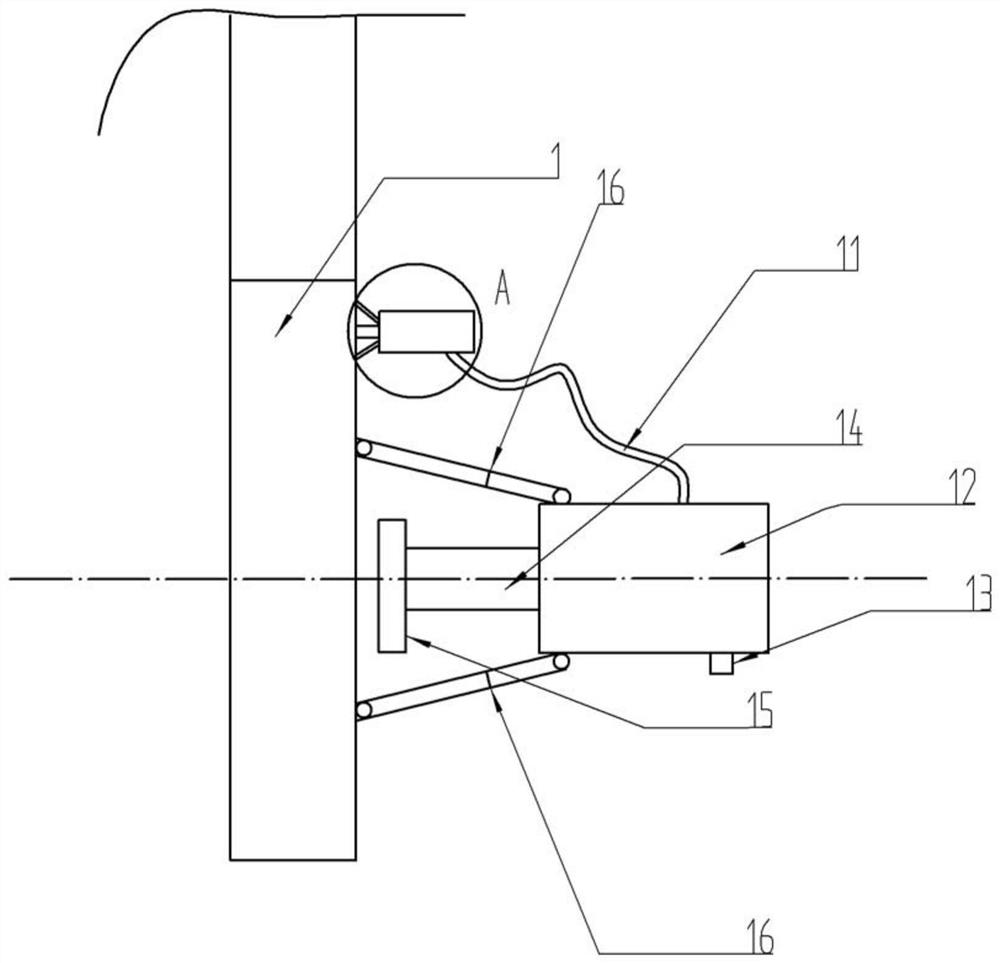
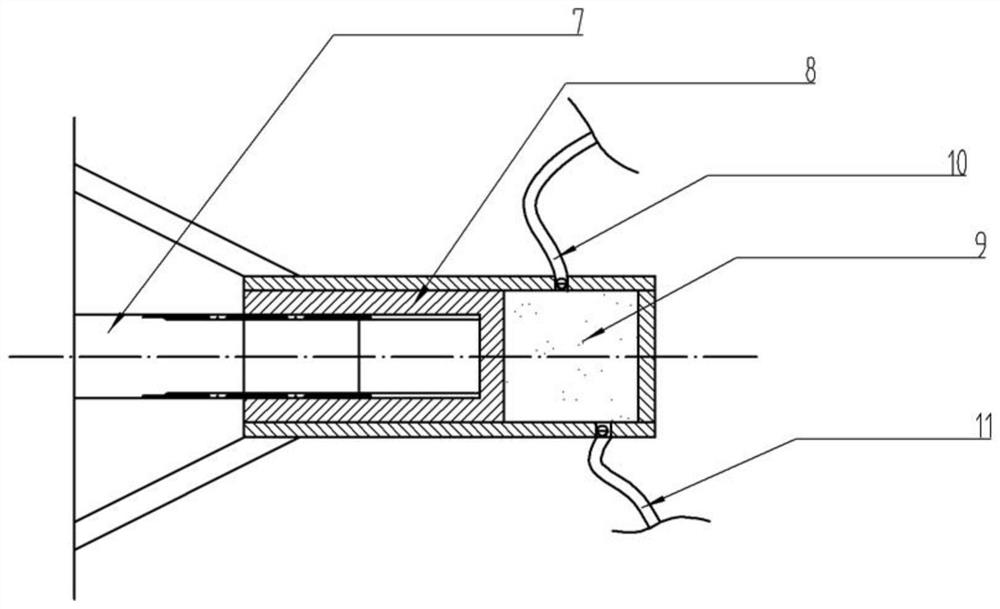
[0029] The reference signs in the drawings of the description include: clamp arm 1, piston 2, bottom 3, workpiece 4, rack 5, gear 6, rotating shaft 7, slider piston 8, liquid chamber 9, liquid inlet pipe 10, liquid outlet pipe 11. Telescopic hydraulic cylinder 12, liquid discharge valve 13, piston rod 14, push plate 15, telescopic rod 16.
[0030] The embodiment is basically as attached figure 1 Shown:
[0031] The industrial robot gripper includes a gripping part, which is ring-shaped and formed by combining two semi-circular gripping arms; it also includes a driving part that drives the opening and closing of the gripping part. The available form of the driving part is Many of them are in the prior art, so I won’t go into details here; there are a plurality of sliding chambers evenly distributed in the inner circumference of the clamp arm, and the bottom 3 of the sliding chamber ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More