

High-speed parallel robot driving system parameter optimization and selection method
A driving system and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of increasing the motion cycle and power consumption of high-speed parallel robots, overestimating the rated torque of servo motor power, and having no way to intuitively display performance. level and other issues, to achieve the effect of improving dynamic performance, reducing driving torque, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention proposes a high-speed parallel robot drive system parameter optimization and selection method, which will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
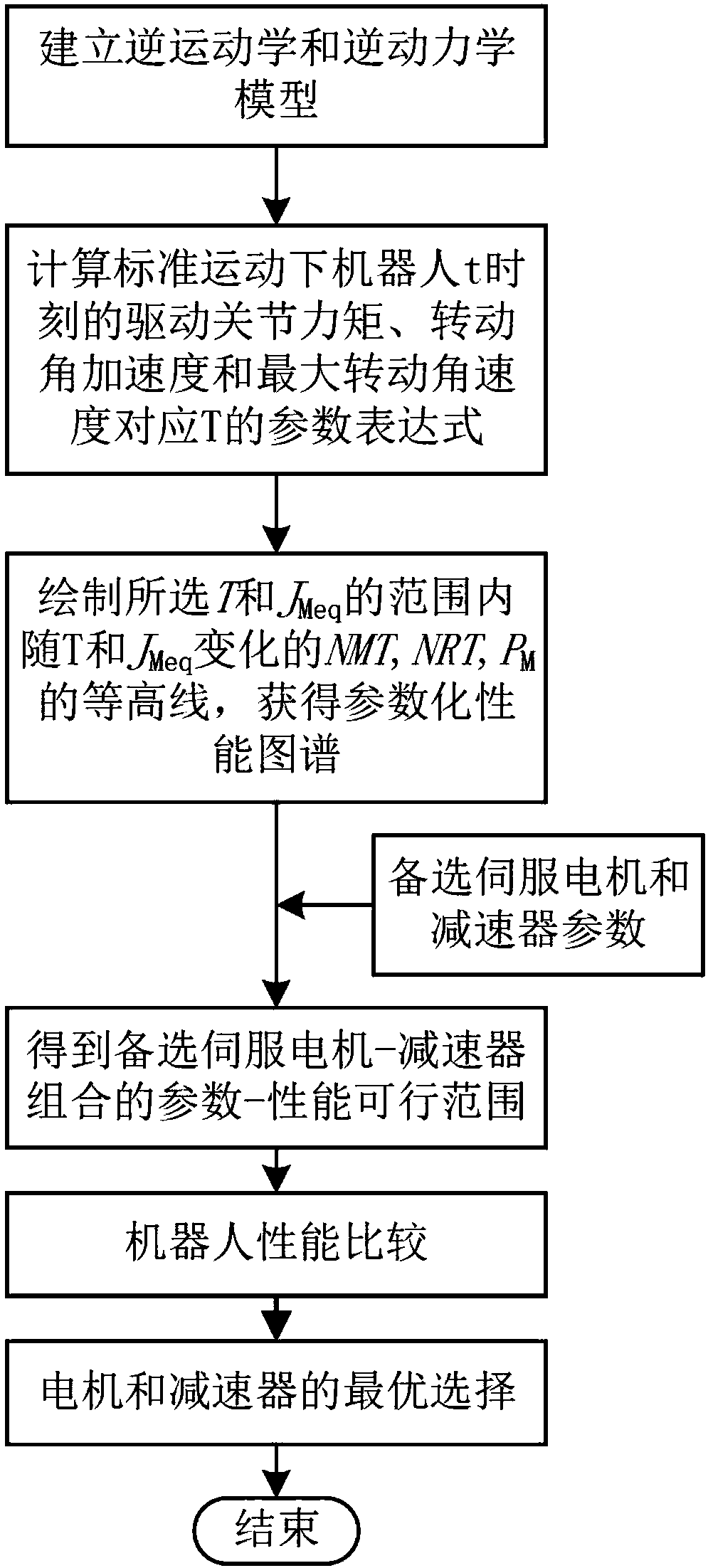
[0040] The present invention proposes a high-speed parallel robot drive system parameter optimization selection method, the drive system parameters include: servo motor rated power P M , Servo motor rated torque τ con,M , Servo motor instantaneous maximum torque τ max,M , Servo motor inertia J M and reducer reduction ratio n, the overall flow of the method is as follows figure 1 shown, including the following steps:
[0041] 1) Determine the inverse kinematics model and inverse dynamics model of the high-speed parallel robot;
[0042] The inverse kinematics model of the high-speed parallel robot (hereinafter referred to as the robot) is established using the existing closed-loop vector method, and the mapping relationship between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More