

Ray-bionic underwater robot
A technology of underwater robot and bionic ray, which is applied in the direction of underwater operation equipment, mechanical gear transmission, ship, etc., can solve the problem of not realistically simulating the differential motion process of ray, poor movement flexibility and concealment, etc. Limitation of application occasions and other issues to achieve the effect of light weight, flexible and convenient movement, and strong three-dimensional movement ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] This embodiment is a bionic ray underwater robot.
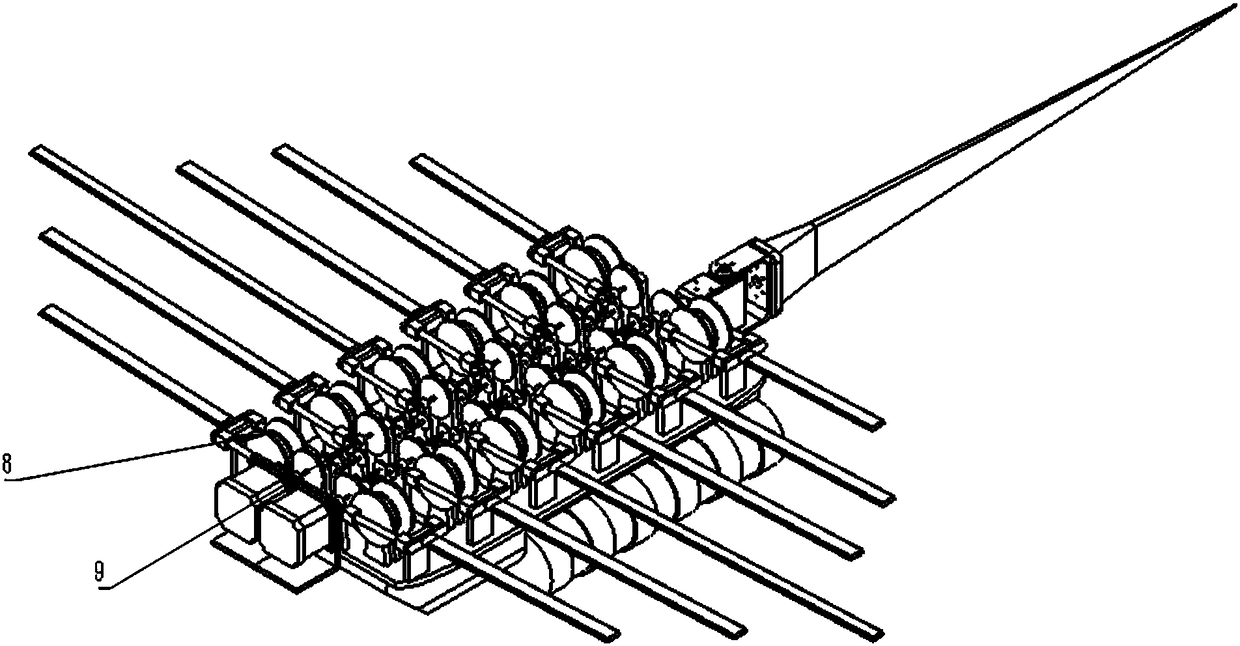
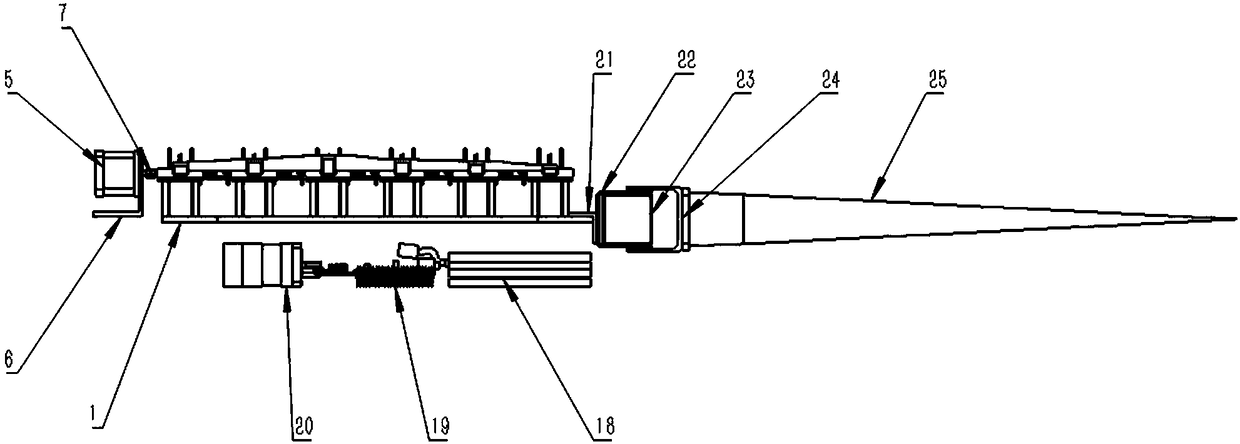
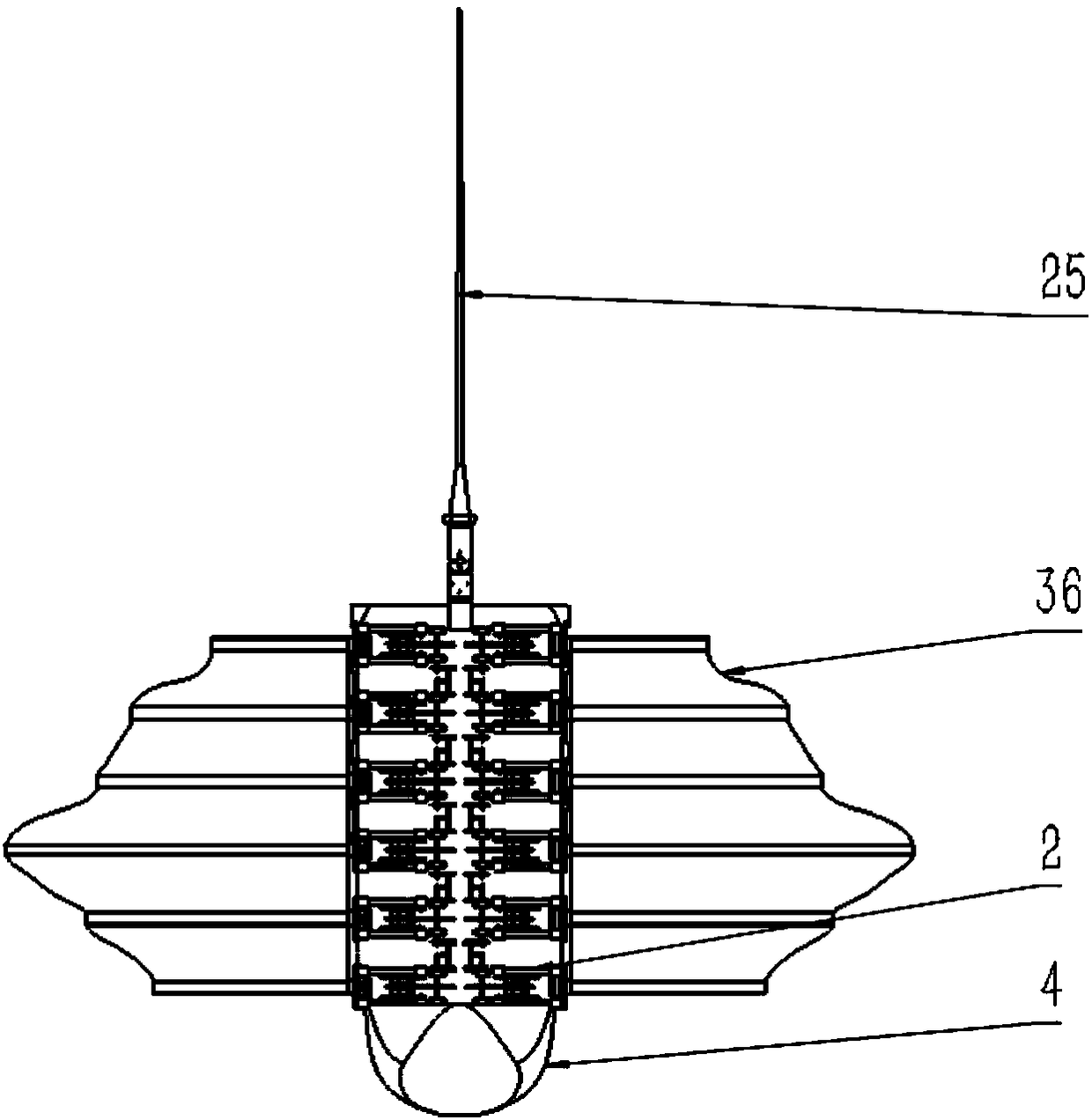
[0025] refer to Figure 1 to Figure 5 , the bionic ray underwater robot of this embodiment is composed of a main body frame, a battery 18, a control module 19, a water pump 20, a motor 5, a wave bar and a tail assembly; 9. The middle plate 1, the upper cover plate 2, the lower deck 3, the head 4, the middle plate 1 is fixedly connected with the upper deck 2, the lower deck 3, the head 4 and the tail components respectively, and the transmission wheel set 8 is connected to the head The portion 4 is connected to the corresponding wave rods on both sides along the axial direction of the middle plate 1 . The middle plate 1 is used as the frame of the compound gear train composed of the transmission wheel set 8 and the differential wheel set 9, and is simultaneously connected with the upper cover plate 2, the lower deck plate 3, the head 4 and the tail assembly as the main body of the robot. The middle plate 1 is symmetri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More