

Workpiece following grabbing locus planning method and system used for high-speed sorting system
A sorting system and trajectory planning technology, applied in general control systems, control/regulation systems, program control, etc., can solve the problems of reduced grasping position accuracy, insufficient dynamic characteristics, and difficulty in implementation, so as to improve grasping efficiency, The effect of improving the grasping accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
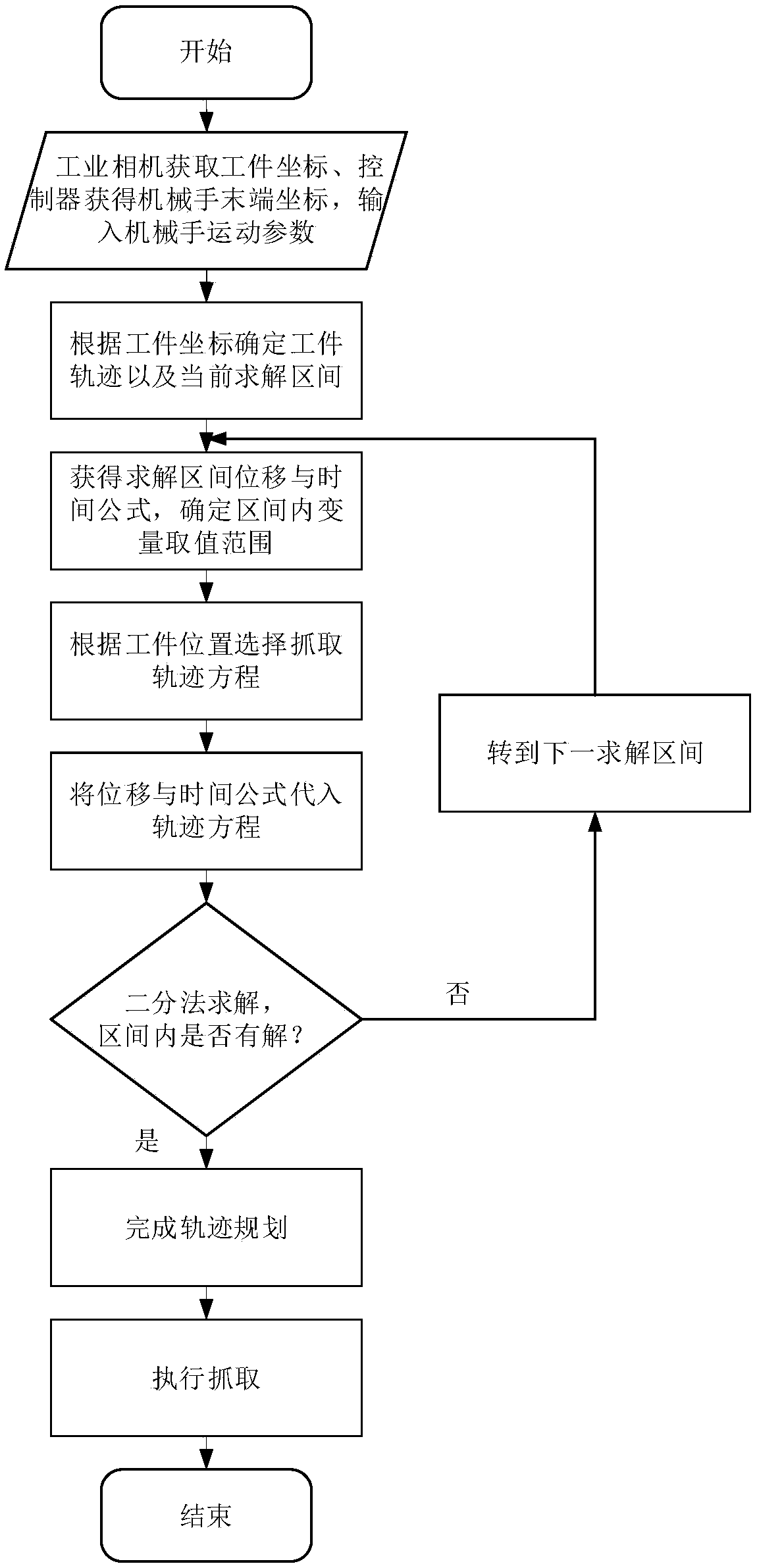
[0073] In order to solve the problems raised by the background technology, the present invention discloses a method for planning a workpiece follow-and-grab trajectory for a high-speed sorting system. The specific process is as follows: figure 1 shown, including the following steps:
[0074] Step1: The industrial camera takes pictures to obtain the coordinates of the workpiece, the controller obtains the coordinates of the end of the manipulator, and inputs the motion parameters of the manipulator;
[0075] Step2: Determine the location of the workpiece trajectory according to the workpiece coordinates, and determine the current solution interval;
[0076] Step3: According to the current solution interval, determine the displacement and time formula of this interval, and determine the value range of a single variable in this interval;
[0077] Step4: Determine the grasping trajectory equation according to the upper and lower half of the working range where the workpiece is lo...
Embodiment 2
[0200]In this embodiment, a workpiece following and grasping trajectory planning system for high-speed sorting systems is disclosed, including a memory, a processor, and a computer program stored on the memory and operable on the processor, and the processor executes The following steps are carried out during said procedure:
[0201] Establish a follow-and-grab trajectory model, and obtain the coordinates of the workpiece, the coordinates of the end of the manipulator, and the motion parameters of the manipulator;
[0202] Determine the location of the workpiece trajectory according to the workpiece coordinates, and determine the current solution interval;
[0203] According to the current solution interval, determine the displacement and time formula of this interval, and determine the value range of a single variable in this interval;
[0204] Determine the grasping trajectory equation according to the upper and lower half of the working range where the workpiece is located...
Embodiment 3
[0208] In this embodiment, a computer-readable storage medium is disclosed, on which a computer program is stored. When the program is executed by a processor, the following steps are performed:
[0209] Establish a follow-and-grab trajectory model, and obtain the coordinates of the workpiece, the coordinates of the end of the manipulator, and the motion parameters of the manipulator;
[0210] Determine the location of the workpiece trajectory according to the workpiece coordinates, and determine the current solution interval;
[0211] According to the current solution interval, determine the displacement and time formula of this interval, and determine the value range of a single variable in this interval;
[0212] Determine the grasping trajectory equation according to the upper and lower half of the working range where the workpiece is located;
[0213] Substitute the displacement and time formula into the trajectory equation;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More