

Master-slave distributed control inspection robot
An inspection robot and distributed control technology, applied in the field of inspection robots, can solve problems such as single detection items, inability to obtain values, simple functions, etc., and achieve the effects of clear control tasks, precise motion control, and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
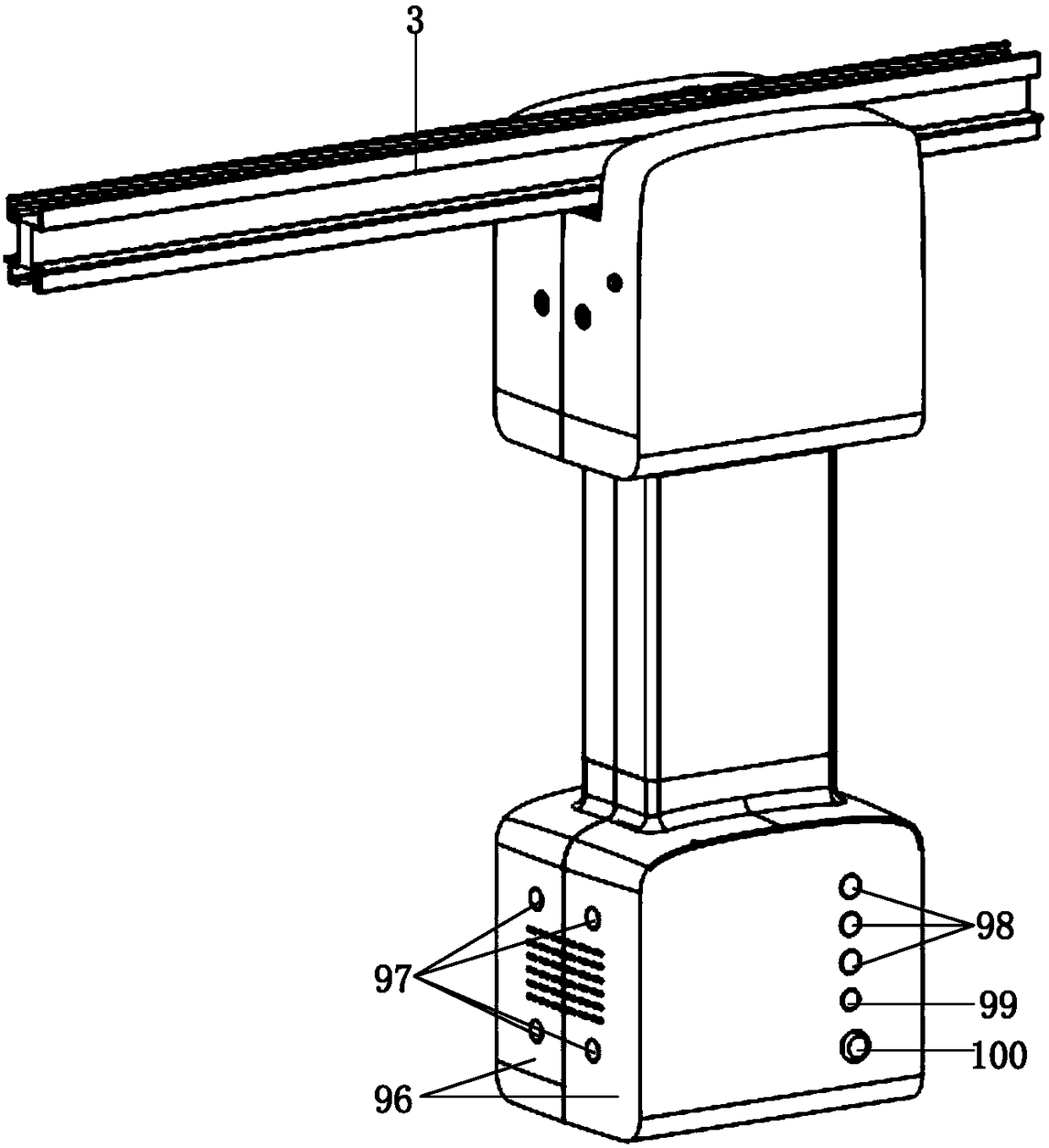
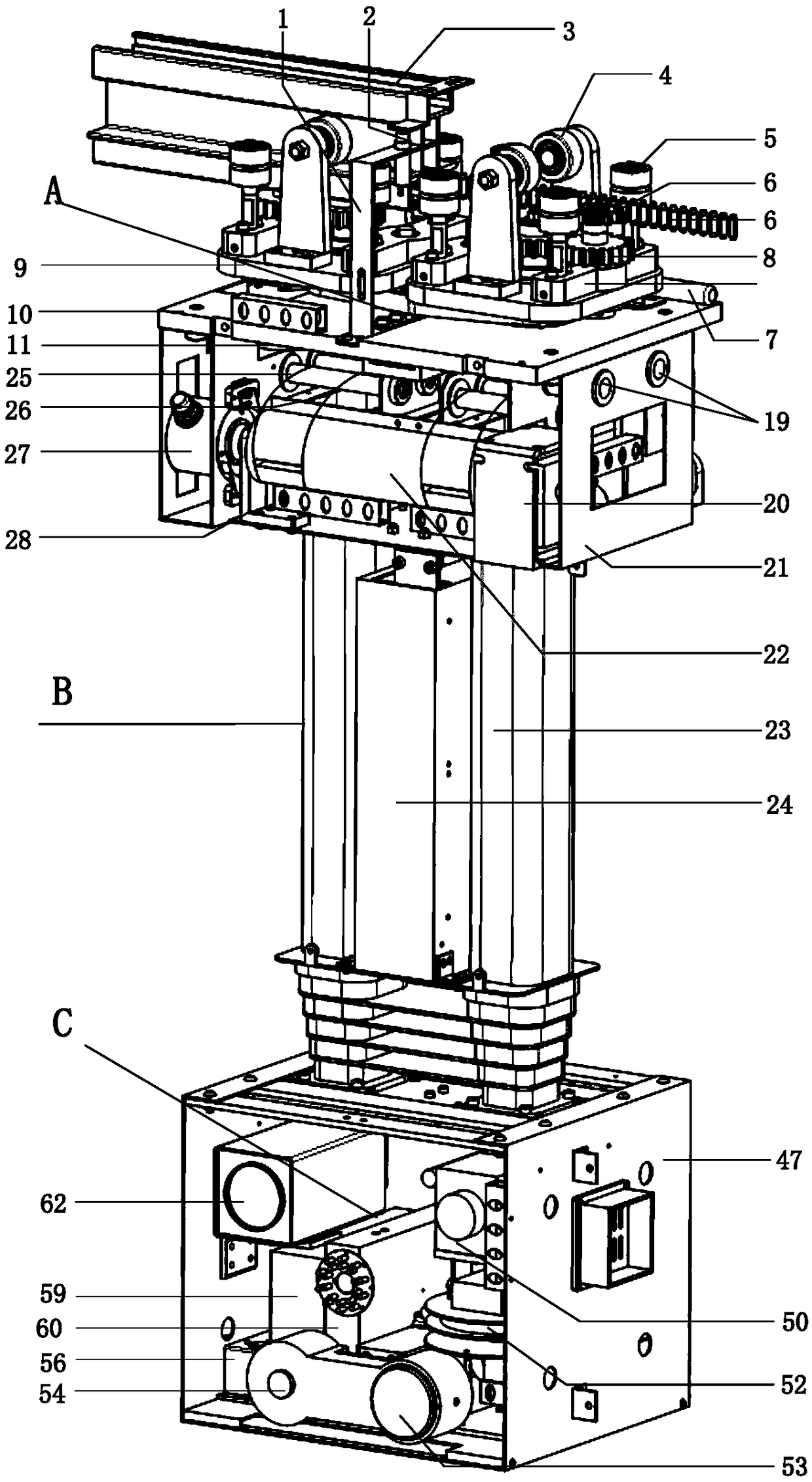
[0028] The inspection robot with master-slave distributed control of the present invention includes a robot body, a detection device, a master-slave distributed body control system based on industrial Ethernet and a multimedia monitoring system, wherein:
[0029] The detection device is used to detect the movement information of the robot body, the environment information of the power distribution room and the information of the cabinet of the power distribution room;
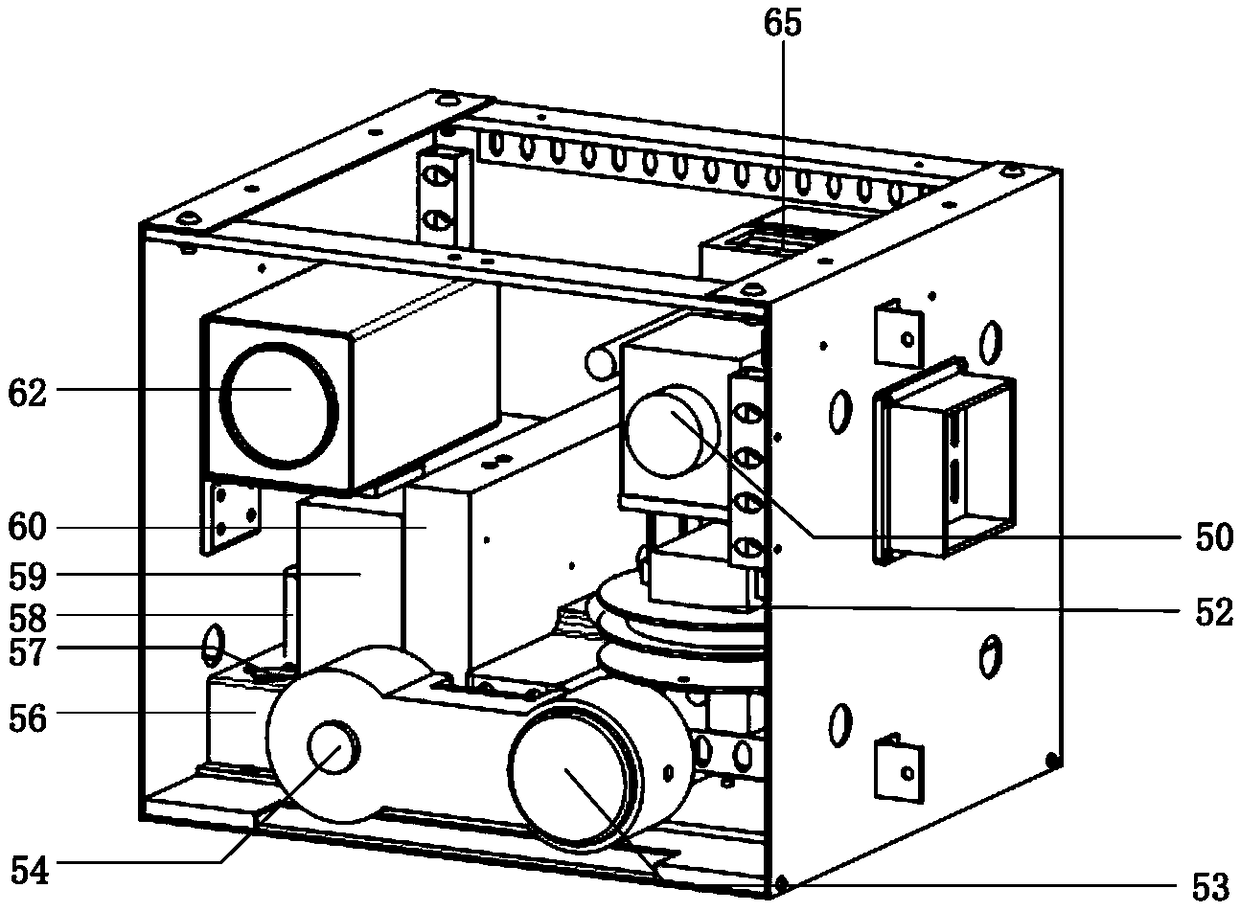
[0030] The master-slave distributed body control system based on industrial Ethernet receives the motion information of the robot body detected by the detection device, the environment information of the power distribution room and the cabinet body information of the power distribution room, and moves the robot body according to the motion information of the robot body control;
[0031] The multimedia monitoring system receives the motion information of the robot, the environment information of the power distri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More