

A displacement transmission structure of an inspection robot
An inspection robot and transmission structure technology, applied in the field of inspection robots, can solve the problems of easy noise, high cost, damage to the body, etc., and achieve the effects of prolonging the service life, uniform force points, and free horizontal movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
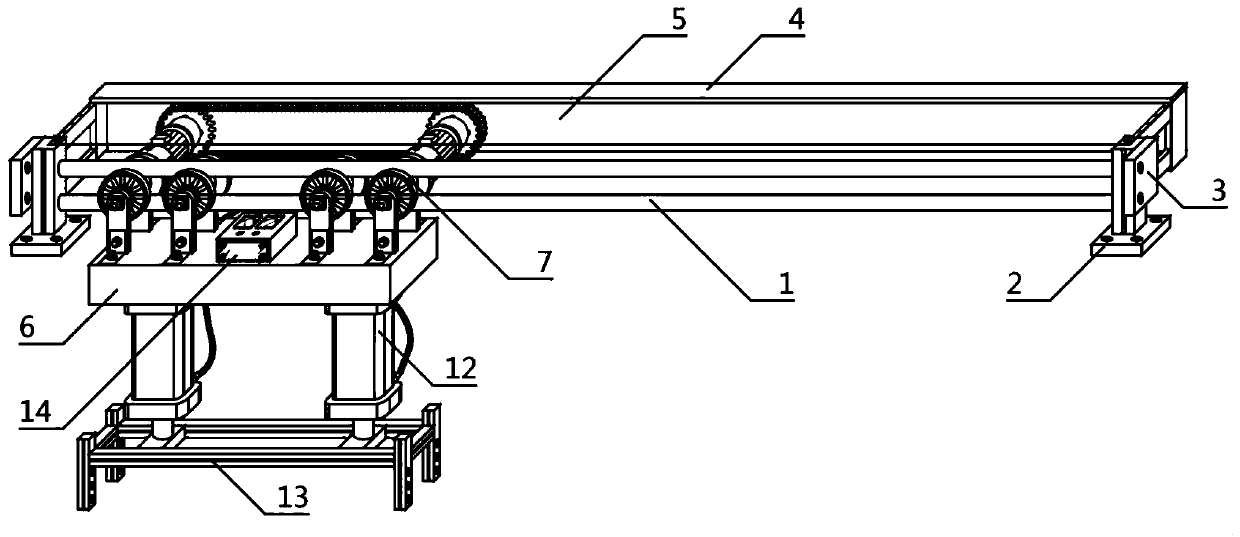
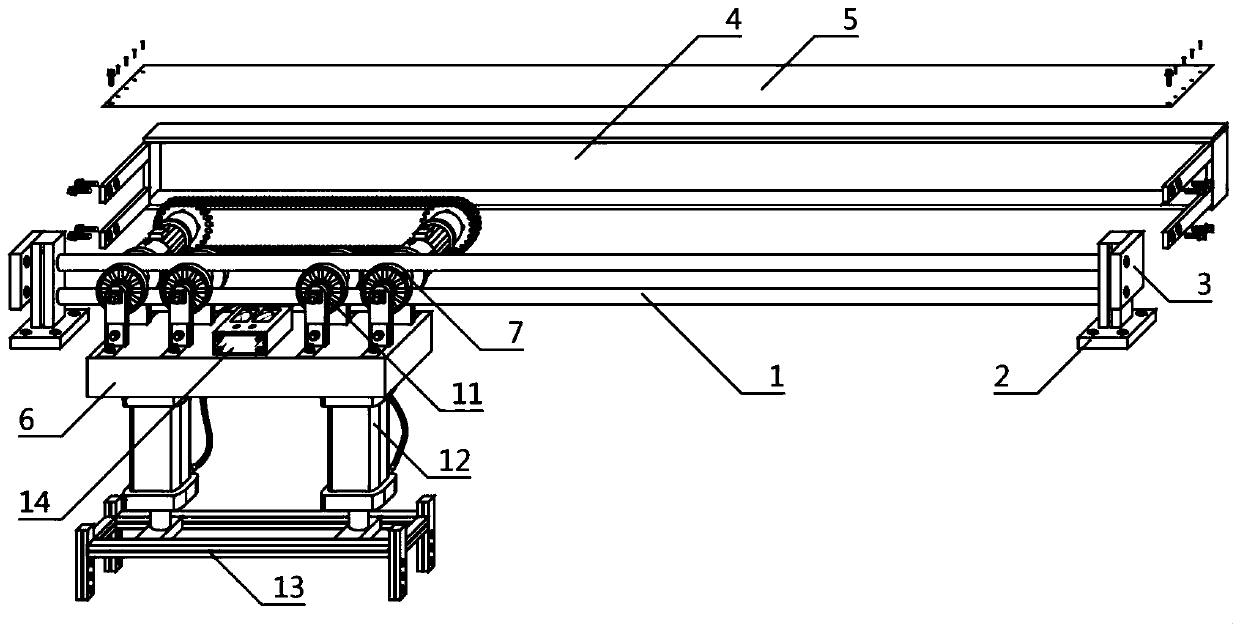
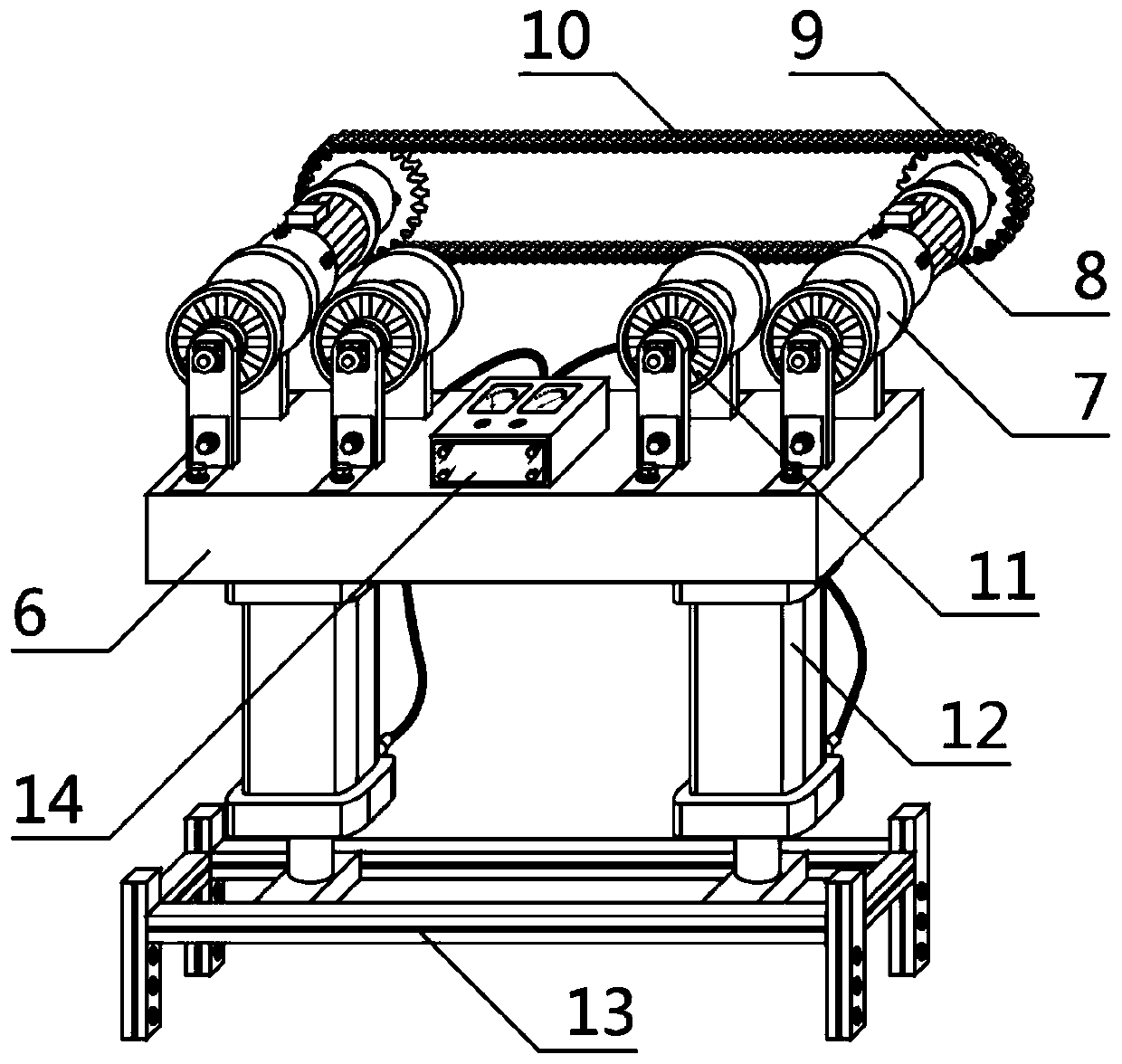
[0026] Such as figure 1 , figure 2 , image 3 , Figure 4 A displacement transmission structure of an inspection robot is shown, which is characterized in that: a horizontal rail frame 1, a transmission protection box 4, a horizontal moving frame 6, several driving pulleys 7, several auxiliary positioning pulleys 11, several lifting devices 12, The inspection device fixing frame 13 and the control box 14 are composed, and the horizontal track frame 1 is also provided with several facade fixing plates 2 and several side fixing plates 3, and any of the facade fixing plates 2 is located on the horizontal track frame 1 The lower part of one side, the facade fixed plate 2 is fixedly connected with the horizontal track frame 1, any of the side fixed plates 3 is located at one side of the horizontal track frame 1, and the side fixed plate 3 and the horizontal track frame 1 are fixed connected, the transmission protection box 4 is located on the other side of the horizontal rail f...
Embodiment 2
[0029] Such as figure 1 , figure 2 , image 3 , Figure 4 A displacement transmission structure of an inspection robot is shown, which is characterized in that: a horizontal rail frame 1, a transmission protection box 4, a horizontal moving frame 6, several driving pulleys 7, several auxiliary positioning pulleys 11, several lifting devices 12, The inspection device fixing frame 13 and the control box 14 are composed, and the horizontal track frame 1 is also provided with several facade fixing plates 2 and several side fixing plates 3, and any of the facade fixing plates 2 is located on the horizontal track frame 1 The lower part of one side, the facade fixed plate 2 is fixedly connected with the horizontal track frame 1, any of the side fixed plates 3 is located at one side of the horizontal track frame 1, and the side fixed plate 3 and the horizontal track frame 1 are fixed connected, the transmission protection box 4 is located on the other side of the horizontal rail f...
Embodiment 3
[0031] Such as figure 1 , figure 2 , image 3 , Figure 4 A displacement transmission structure of an inspection robot is shown, which is characterized in that: a horizontal rail frame 1, a transmission protection box 4, a horizontal moving frame 6, several driving pulleys 7, several auxiliary positioning pulleys 11, several lifting devices 12, The inspection device fixing frame 13 and the control box 14 are composed, and the horizontal track frame 1 is also provided with several facade fixing plates 2 and several side fixing plates 3, and any of the facade fixing plates 2 is located on the horizontal track frame 1 The lower part of one side, the facade fixed plate 2 is fixedly connected with the horizontal track frame 1, any of the side fixed plates 3 is located at one side of the horizontal track frame 1, and the side fixed plate 3 and the horizontal track frame 1 are fixed connected, the transmission protection box 4 is located on the other side of the horizontal rail f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More