

Oil and electricity hybrid multi-rotor unmanned aerial vehicle control system and method
A multi-rotor unmanned aerial vehicle and control system technology, which is applied in the oil-electric hybrid multi-rotor unmanned aerial vehicle control system and control field, can solve problems such as complex control procedures, unmanned aerial vehicle damage, and user loss, and achieve stable flight, Captures stable, well-structured results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
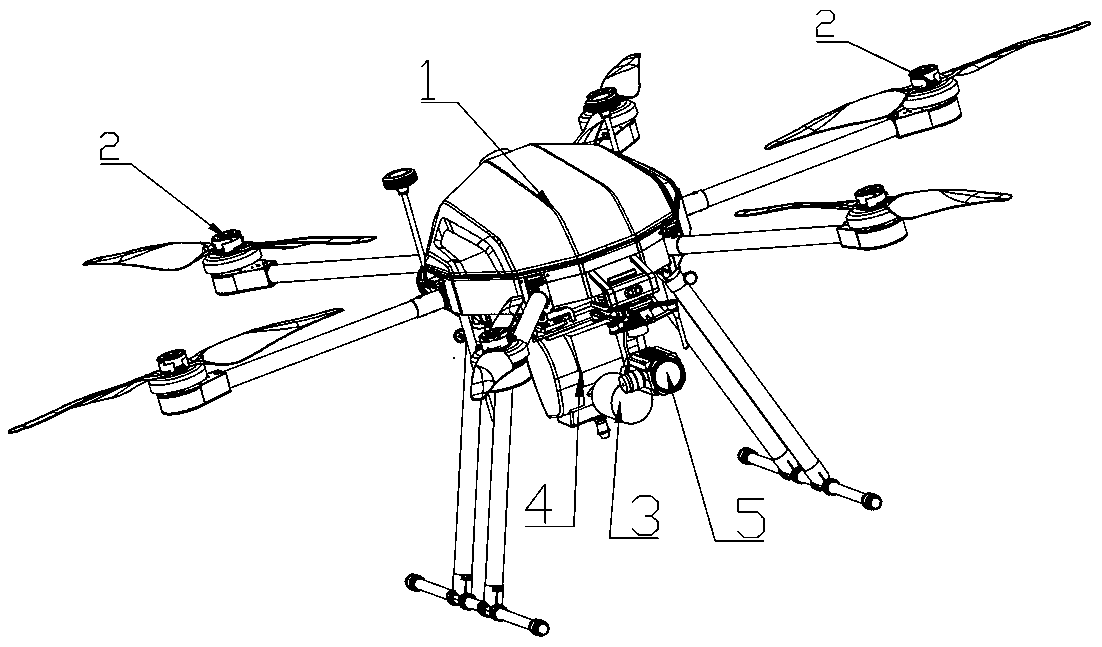
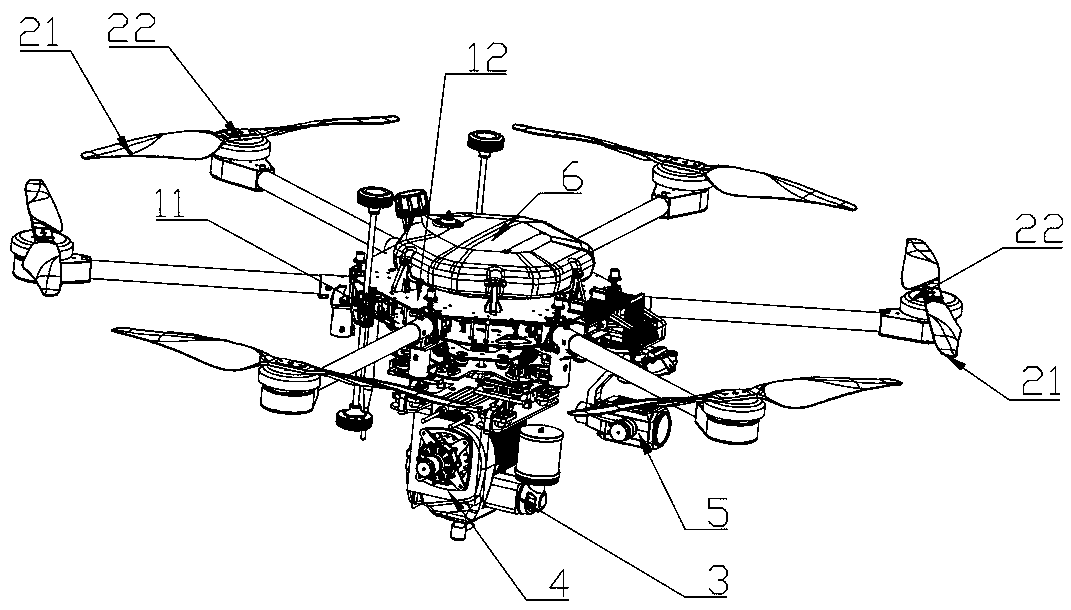
[0109] A compact multi-rotor oil-electric hybrid UAV, such as figure 1 As shown, it includes a fuselage 1 and a plurality of rotors 2 evenly spaced on the side of the fuselage. The bottom of the fuselage 1 is provided with an engine module 3, a generator module 4 and a pan-tilt assembly 5, such as figure 2 As shown, the top of the fuselage 1 is provided with a fuel tank 6; the inside of the fuselage 1 is provided with a control system (not marked in the figure), and the fuselage 1 includes a first fixed plate 11 and a second fixed plate 12, The engine module 3, the generator module 4 and the platform assembly 5 are located at the lower end of the first fixed plate 11, the engine module 3 is connected with the generator module 4, and the engine module 3 can drive the generator The module 4 is running, and the generator module 4 and the pan-tilt assembly 5 are electrically connected to the control system respectively;
[0110] Such as figure 2 As shown, the rotor 2 is hinged...
Embodiment 2
[0138] The present invention also provides a method for controlling an oil-electric hybrid multi-rotor UAV. The method specifically includes the following steps:
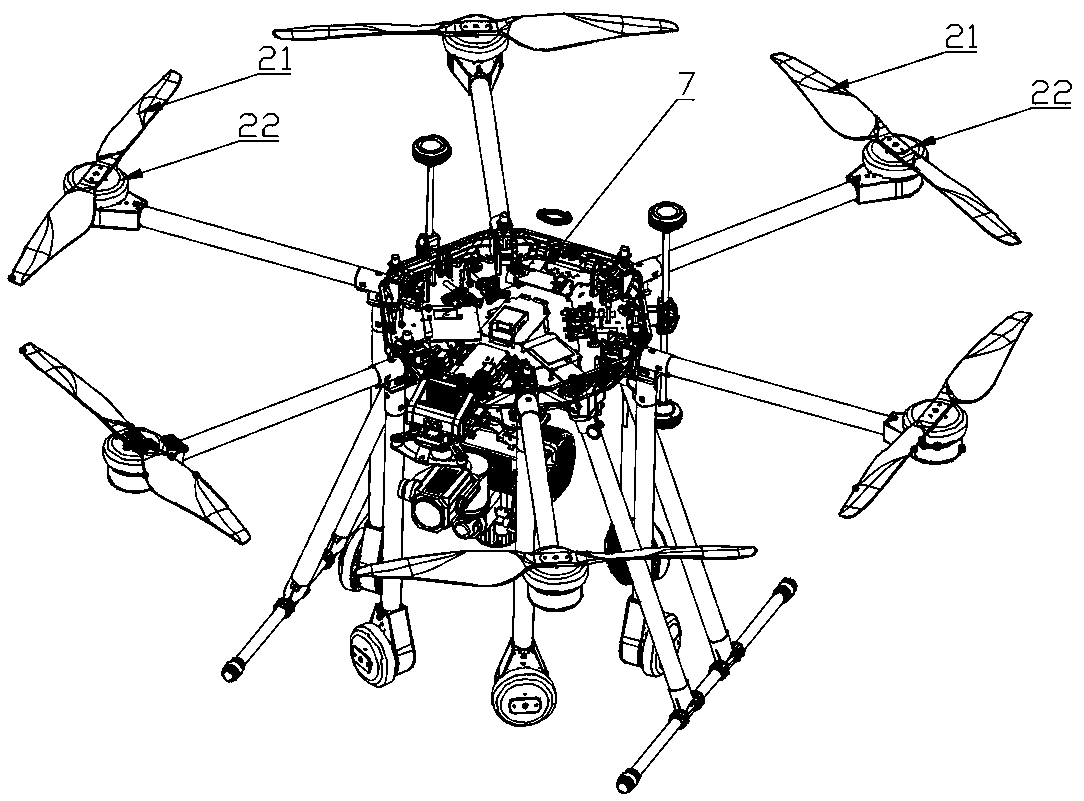
[0139] engine start, such as Figure 7 shown, including the following steps:
[0140] A1: Connect the power supply of the engine and keep the engine at idle speed;
[0141] A2: Use the engine starter to start the engine, remove the starter after ignition;
[0142] A3: On the remote control end, turn the engine control switch to the "Run" position;
[0143] A4: Run stably for about 1 minute to warm up the engine;
[0144] In step A1, the power supply is a battery provided on the drone. In order not to increase the weight of the drone, the battery is mainly used for starting the drone, so the volume and weight are relatively small. The start of the engine can be controlled by the remote control terminal, and the engine can be started by turning the control knob of the remote control to the running position.
[01...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More