

Movable hand soft body rehabilitation training system
A rehabilitation training and software technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as difficult and complex precise control, limited degrees of freedom, complex structure, etc., and achieve the effect of low price, easy maintenance, and saving medical resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
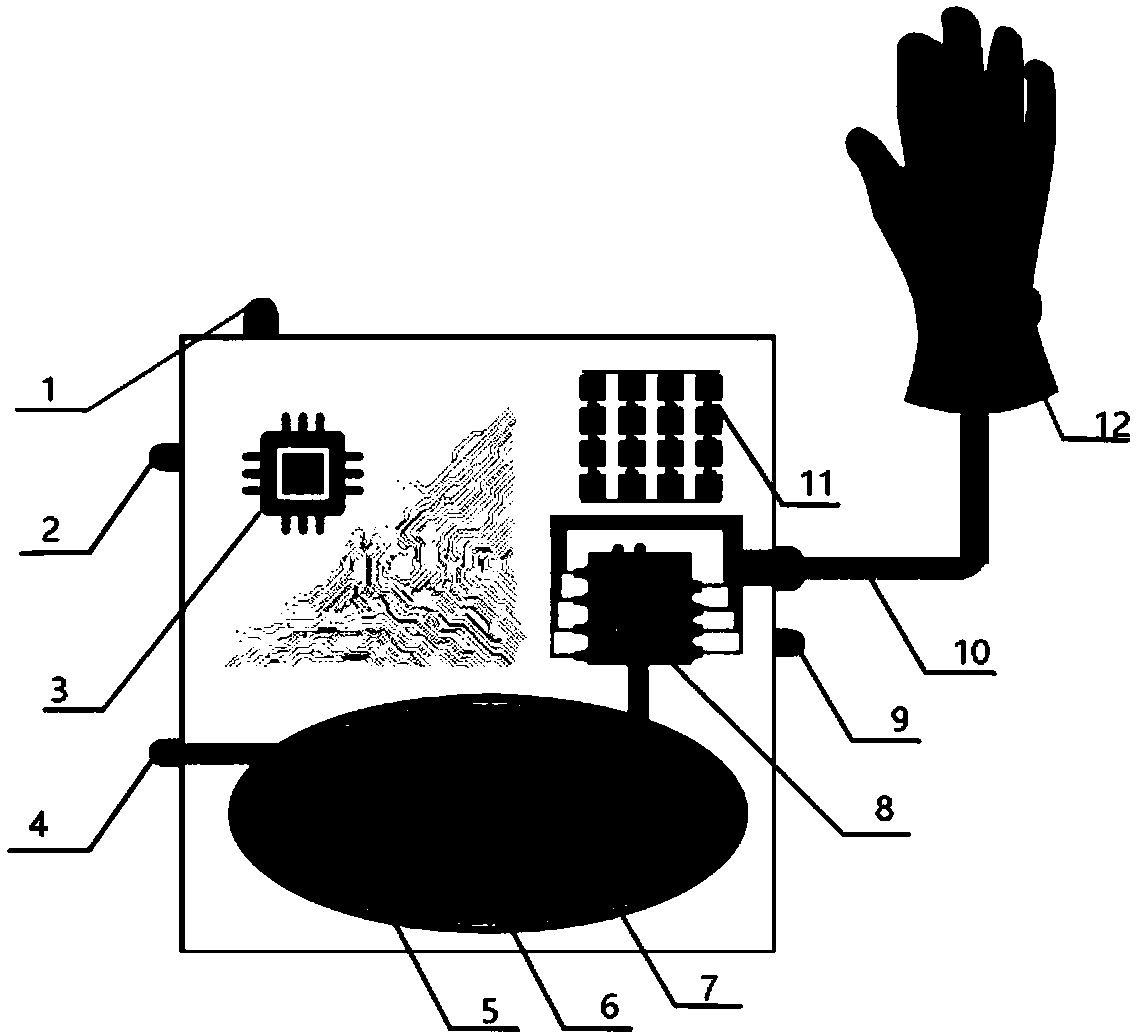
[0019] The structure diagram of a mobile software hand rehabilitation training system is as follows: figure 1 As shown, the system includes a control box and a soft rehabilitation glove 12 .
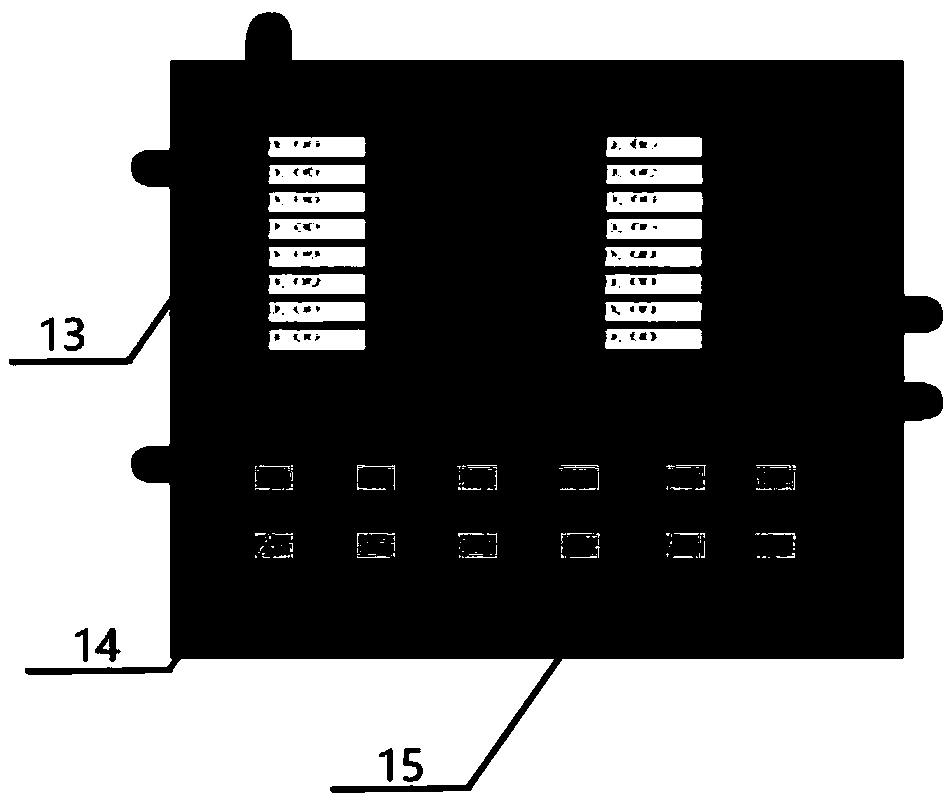
[0020] The control box includes communication interface 1, power supply interface 2, air source interface 4, air guide interface 9 installed on the side, control system 3 installed inside, air bag 7, temperature sensor 5, air pressure sensor 6, multi-channel miniature solenoid valve 8. The battery pack 11, and if figure 2 The shown touch screen 13, function keys 14, and loudspeaker 15 are installed on the front.
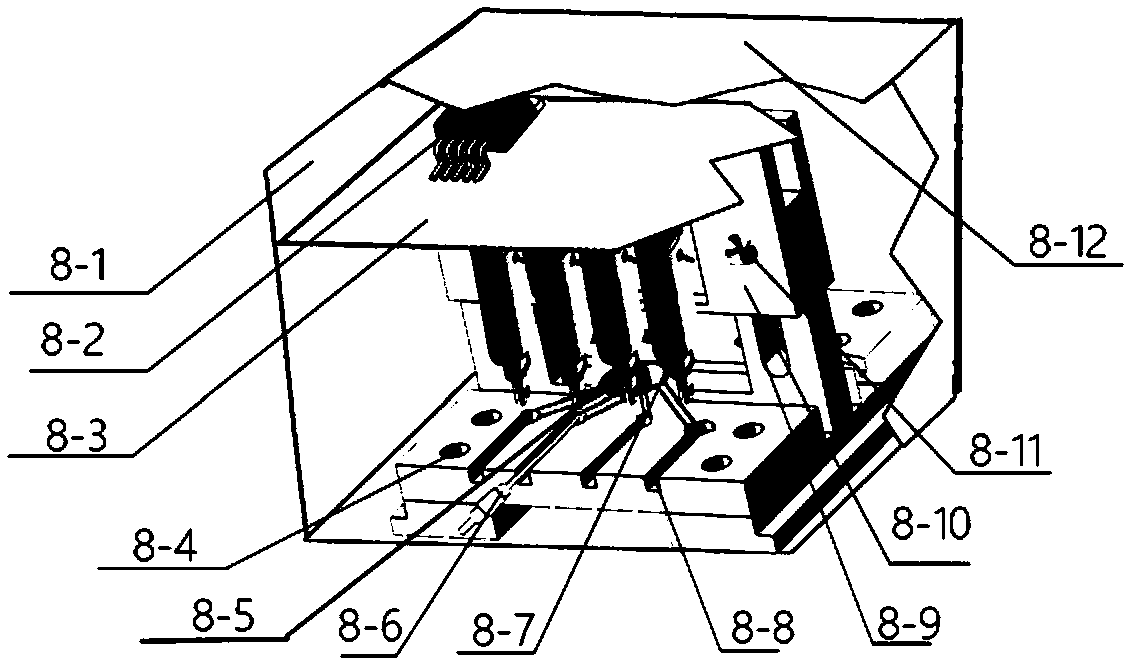
[0021] The structure diagram of the multi-channel miniature solenoid valve 8 is as follows: image 3 As shown, its front view is shown in Figure 4 As shown, the multi-channel miniature solenoid valve 8 is composed of a communication interface 8-13 installed on the side, an air guide interface 8-6, a power switch 8-14, a status indicator light 8-15 on the front, and an inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More