

Seven-degree-of-freedom humanoid mechanical arm driven by pneumatic muscle
A technology of pneumatic muscles and degrees of freedom, applied in the fields of robotics and bionics, can solve the problems of increasing the difficulty of control of the robotic arm, unnatural movement of the robotic arm, and low degree of human imitation, and achieves a simple structure, easy control, and flexible installation position. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited to the following embodiments.
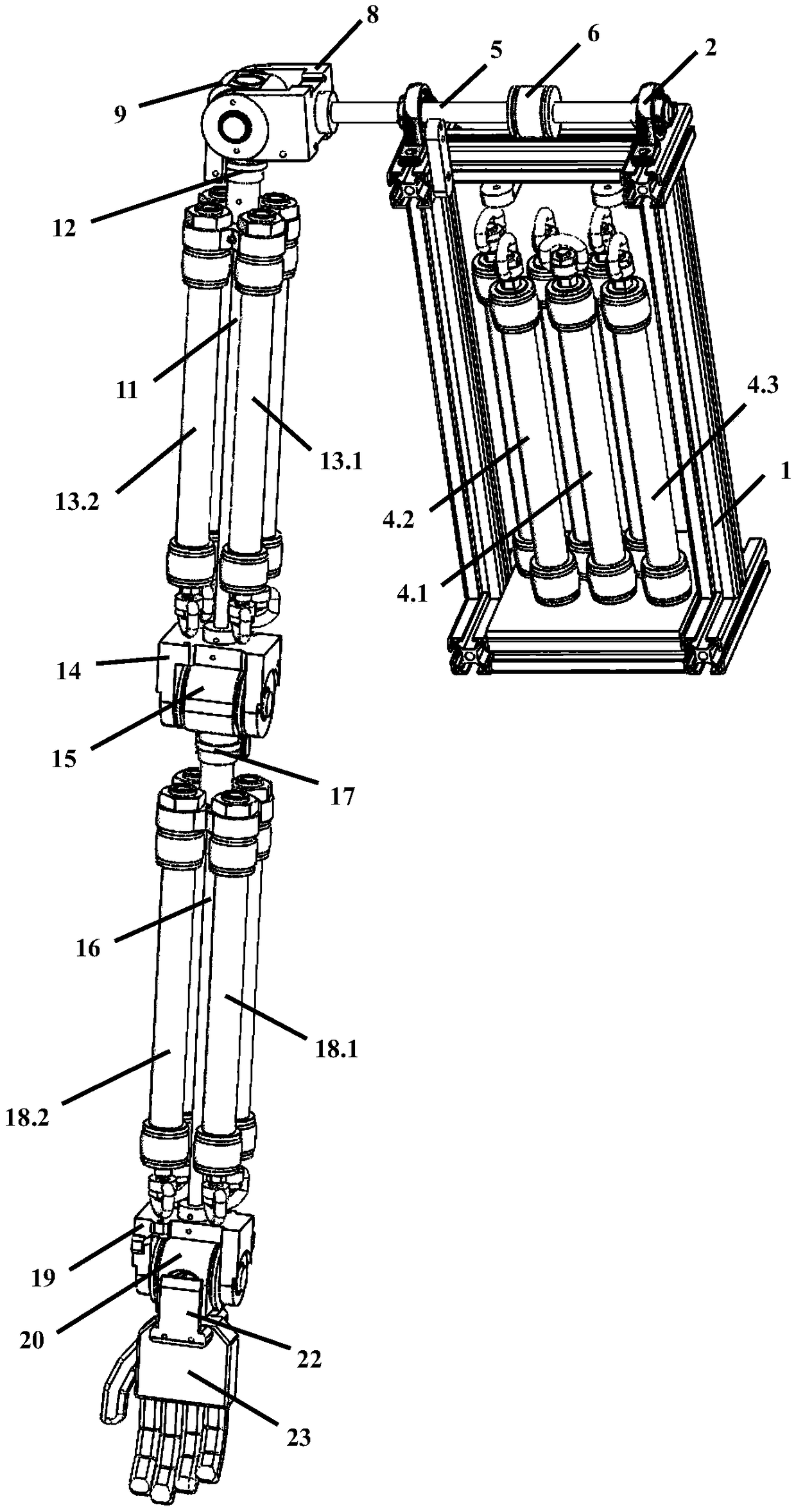
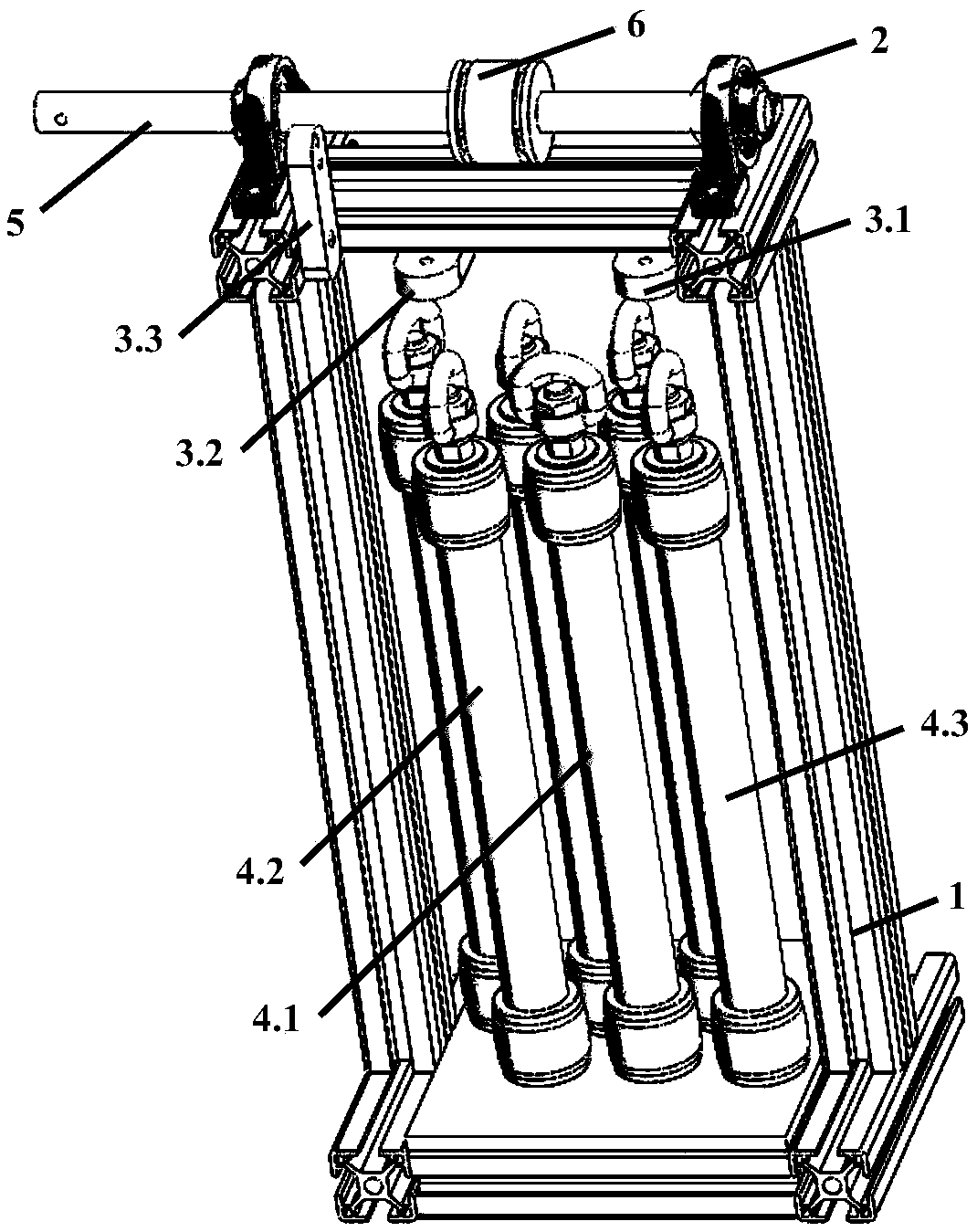
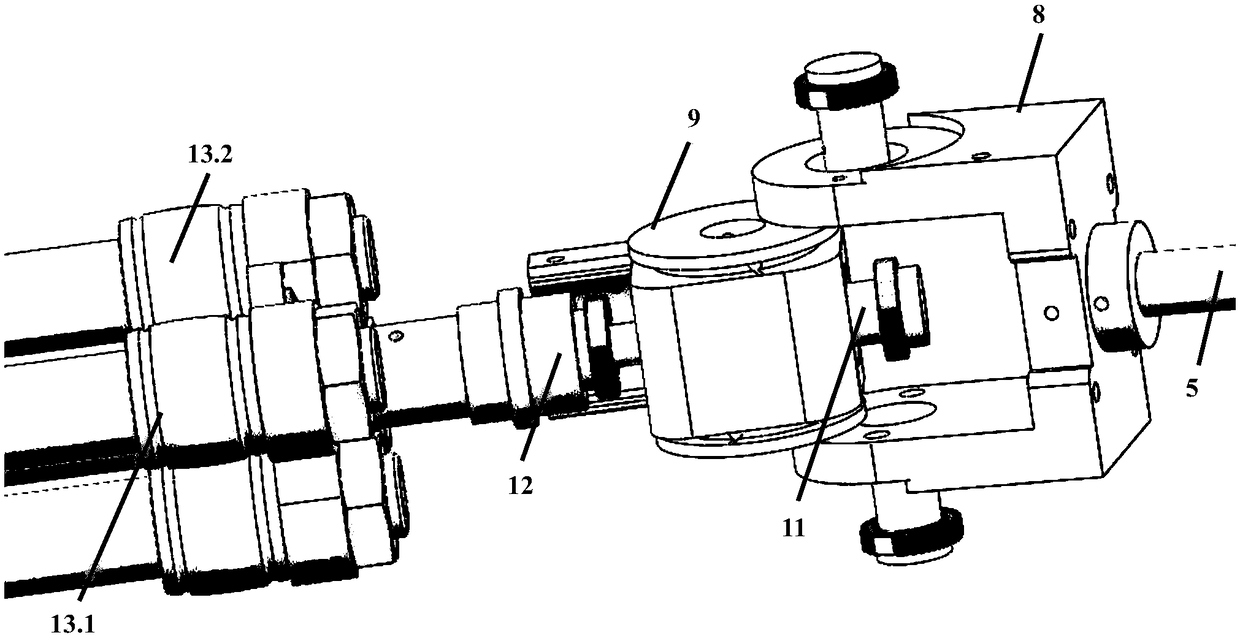
[0027] The technical solution adopted in the present invention is a seven-degree-of-freedom humanoid robot arm driven by pneumatic muscles. The shoulder joint, elbow joint and wrist joint of the mechanical arm are all driven by pneumatic muscles, and the pneumatic muscles driving the movement of the shoulder joints include pneumatic muscles a( 4.1), aerodynamic muscle b (4.2) and aerodynamic muscle c (4.3), the aerodynamic muscle driving the movement of the elbow joint includes the aerodynamic muscle d (13.1), the aerodynamic muscle driving the movement of the wrist joint includes the aerodynamic muscle e (13.2), the aerodynamic muscle f (18.1) and pneumatic muscle g (18.2).
[0028] The fixed bracket (1) is in the shape of a mouth, the upper end of the fixed bracket (1) is fixed with a seated beari...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More