

Binocular vision-based power transmission line online detection method for patrol robot
A technology for inspecting robots and transmission lines, applied in instruments, computer parts, biological neural network models, etc., to avoid cost problems, solve singleness, and reduce labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
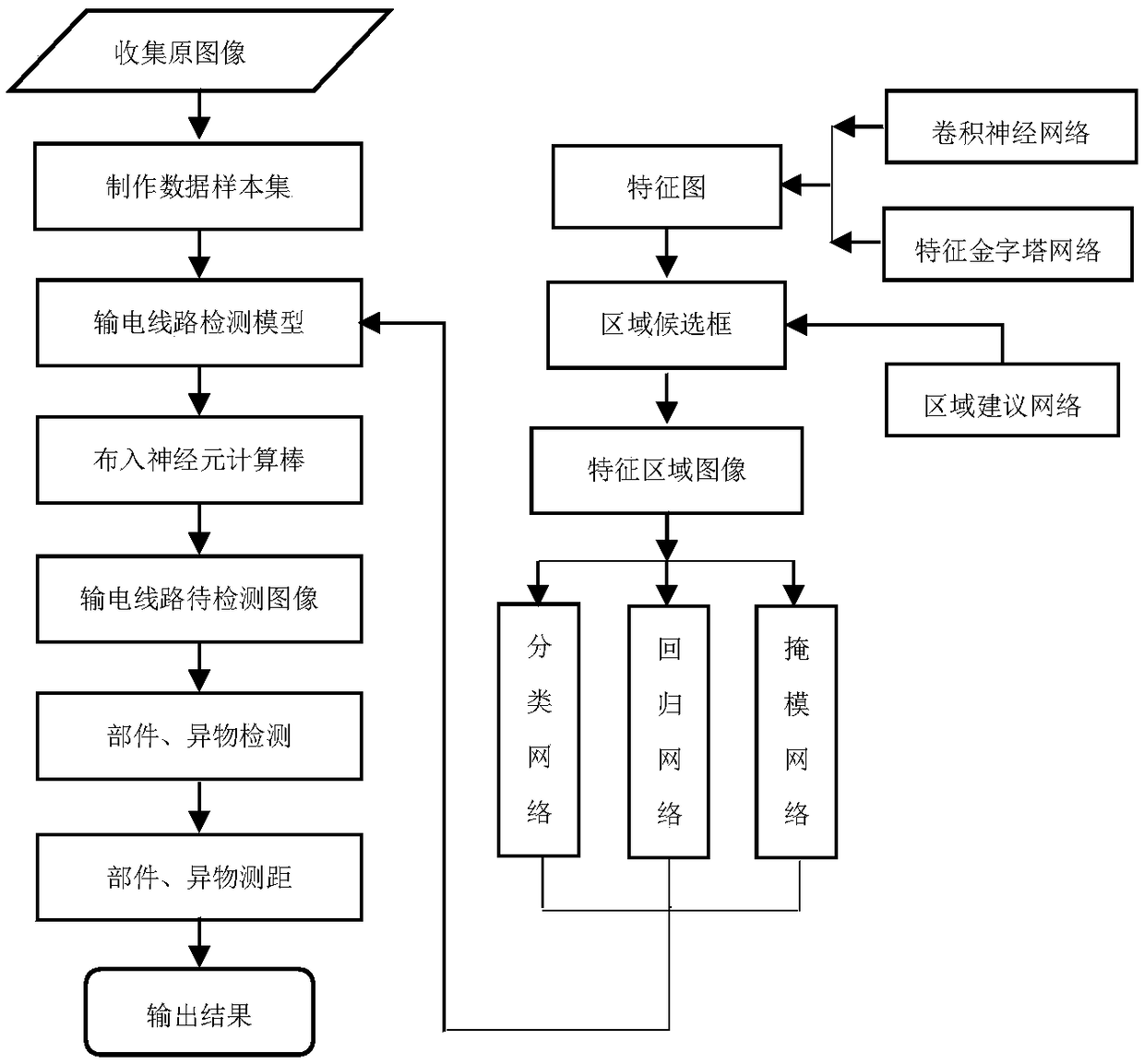
[0044] A binocular vision-based online detection method for transmission lines of inspection robots, such as figure 1 shown, including the following steps;
[0045] Step 1: Create a data sample set of transmission line components: collect the original images taken by the inspection robot, mark the position of the transmission line components in the collected original images and add label information, and mark the upper and lower parts of the transmission line components with a rectangular frame The left and right boundaries, the label of the transmission line component is recorded as the name of the corresponding component, and the coordinates of the upper left corner and the lower right corner of the rectangle are respectively recorded as X min , Y min , X max , Y max , and write the information to the file.
[0046] Step 2: Pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More