

Multi-joint robot integrated cooperative control device and method
A multi-joint robot and collaborative control technology, which is applied in the control of electromechanical transmission, motor control, motor generator control, etc., can solve difficult standardization and other problems, and achieve the effect of simplified calculation and convenient digital processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings.
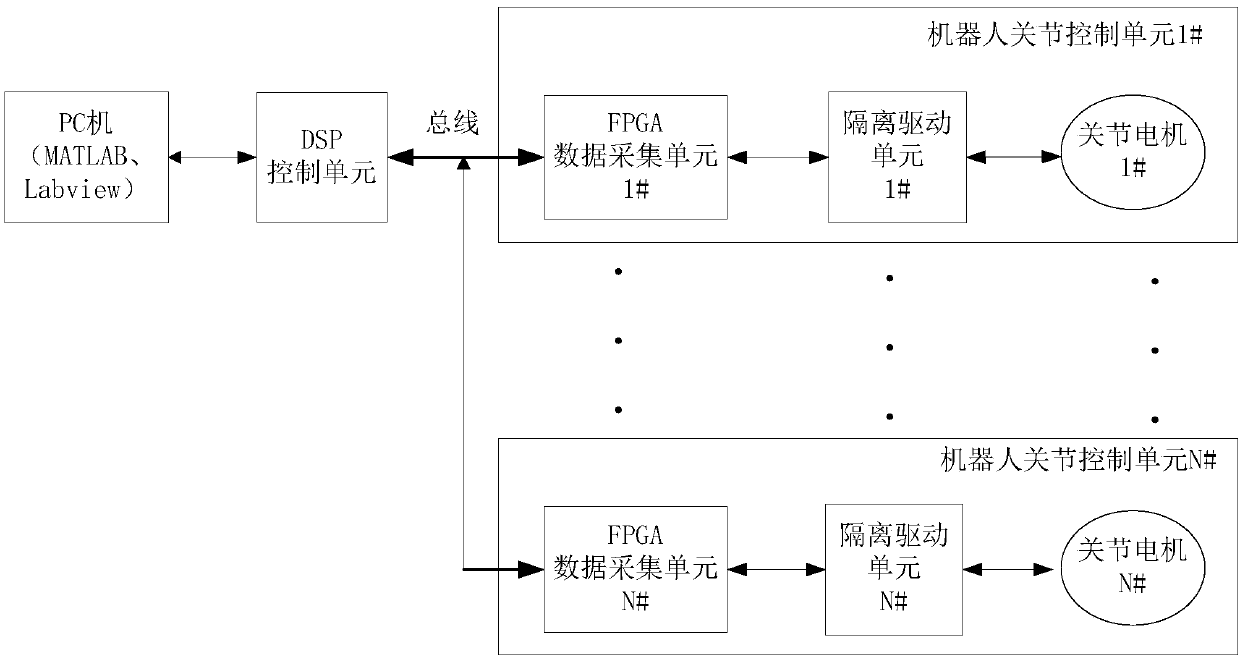
[0052] An integrated cooperative control device for a multi-joint robot, comprising a PC, a DSP control unit and several robot joint control units;
[0053] The PC is connected with the DSP control unit, and the robot joint control unit is connected with the DSP control unit through the bus;
[0054] The robot joint control unit includes an FPGA data acquisition unit, an isolation drive unit and a joint motor; the FPGA data acquisition unit, the isolation drive unit and the joint motor are sequentially connected.
[0055] Matlab software or Labview software is installed on the PC, and a multi-motor cooperative control simulation model is built on the PC for algorithm verification, and the C code generated by the simulation model is downloaded to the DSP control unit for operation.
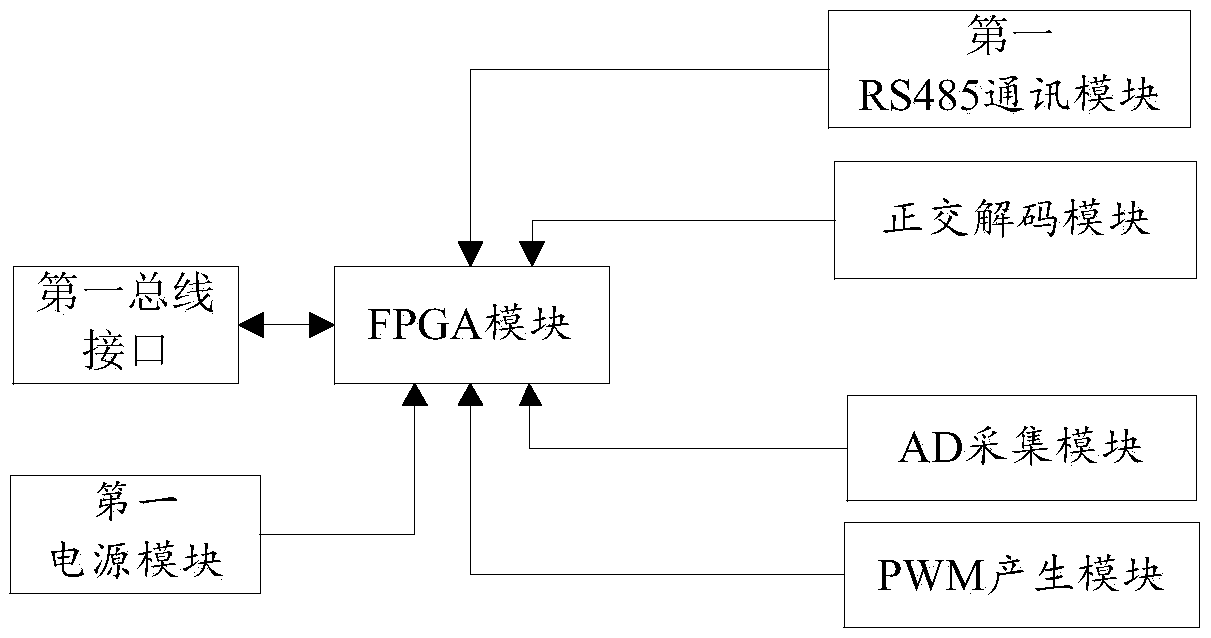
[0056] Such as image 3 As shown, the FPGA data acquisition unit includes an FPGA mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More