

Remote multi-functional fruit-picking machine
A multi-functional, picking machine technology, applied in the direction of picking machines, harvesters, agricultural machinery and tools, etc., can solve the problems of limited picking range, high application cost, complex technology and structure, and achieve low labor intensity and Labor cost, easy real-time control, and wide operating range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
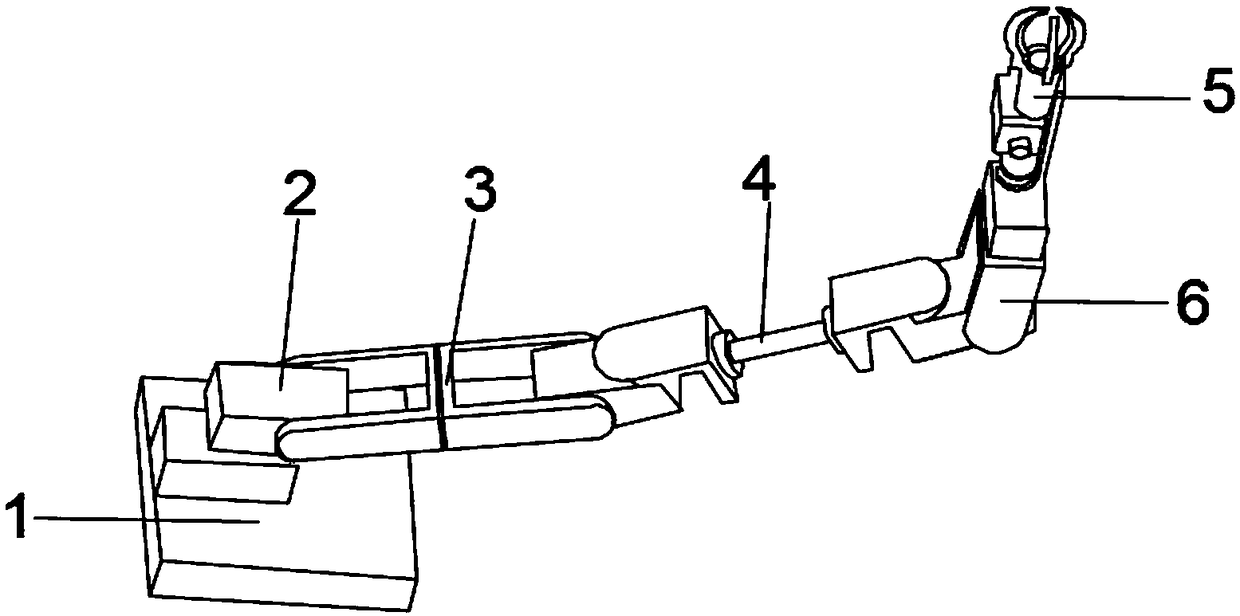
[0033] Such as figure 1 As shown, the actuator includes a chassis 1, a base 2, a large arm 3, a small arm 4, a wrist 5, and a manipulator 6. The base is connected to the chassis 1 by screws, and the base 2, the large arm 3, the small arm 4, and the wrist 5 1. The manipulator 6 is sequentially connected through a U-shaped bracket; the base 2 is provided with a 270-degree high-precision digital steering gear, the upper arm 3 is provided with a 180-degree high-precision digital steering gear, and the small arm 4 is provided with a 180-degree high-precision digital steering gear. Digital steering gear, the wrist 5 is divided into a horizontal axis and a vertical axis, a 270-degree controllable analog steering gear is set on the horizontal axis, a 180-degree high-precision digital steering gear is set on the vertical axis, and a 90-degree high-precision steering gear is set on the manipulator 6. Digital steering gear and high-definition camera.
[0034] The chassis is a crawler ve...
Embodiment 2
[0042] The actuator includes a chassis 1, a base 2, a big arm 3, a small arm 4, a wrist 5, and a manipulator 6. The claws 6 are sequentially connected by U-shaped brackets;
[0043] Due to the random distribution of apple growth positions, it is required that the end effector of the manipulator arm can move to the designated point with accurate position and attitude, and the picking robot should have a certain number of degrees of freedom. The degree of freedom of the manipulator is the key parameter of the design, and its number should match the task to be completed. Generally speaking, the more degrees of freedom, the better the flexibility and obstacle avoidance ability of the manipulator, but adding one degree of freedom will It is equivalent to adding a first-level drive, which will increase the cost of the robot. For agricultural robots, the high cost will greatly slow down the commercialization and practicalization of their machinery. At the same time, increasing the d...
Embodiment 3
[0051] Based on the statement of Example 1,
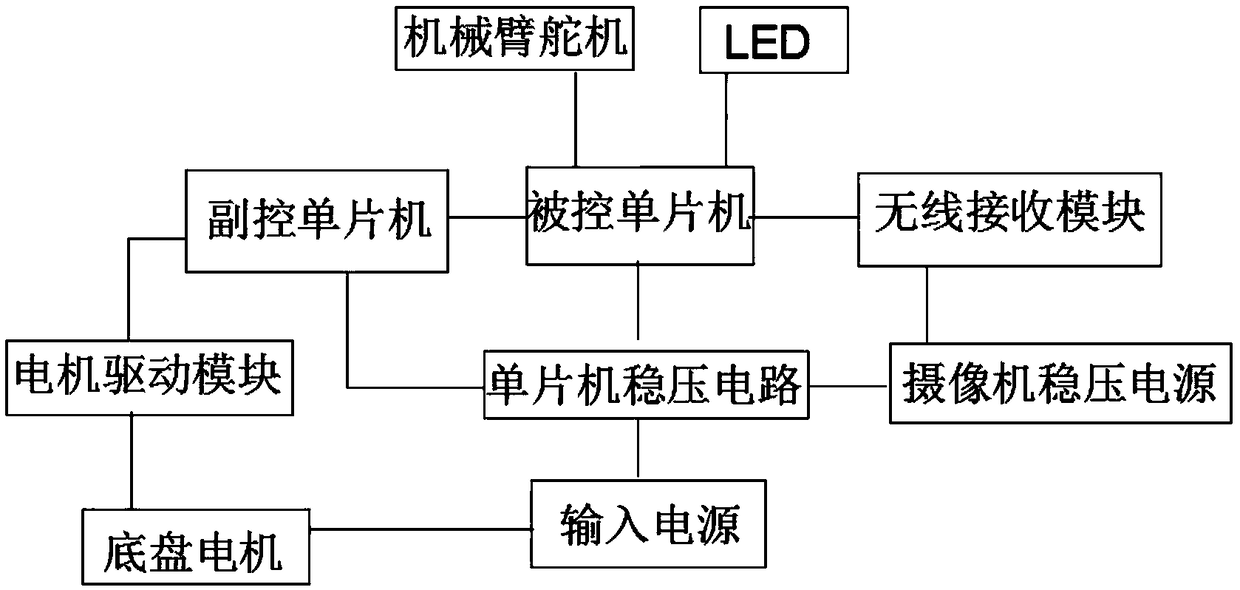
[0052] Further, the camera set on the manipulator is a 720P high-definition camera with infrared night vision function, the high-definition camera is provided with a transmitting module, the transmitting module includes a transmitting device and an encoding chip, and the transmitting device includes a wifi transmitter and 5.8ghz wireless transmitter and encoder, used for real-time monitoring of the location of the picker and sending back the location picture information;
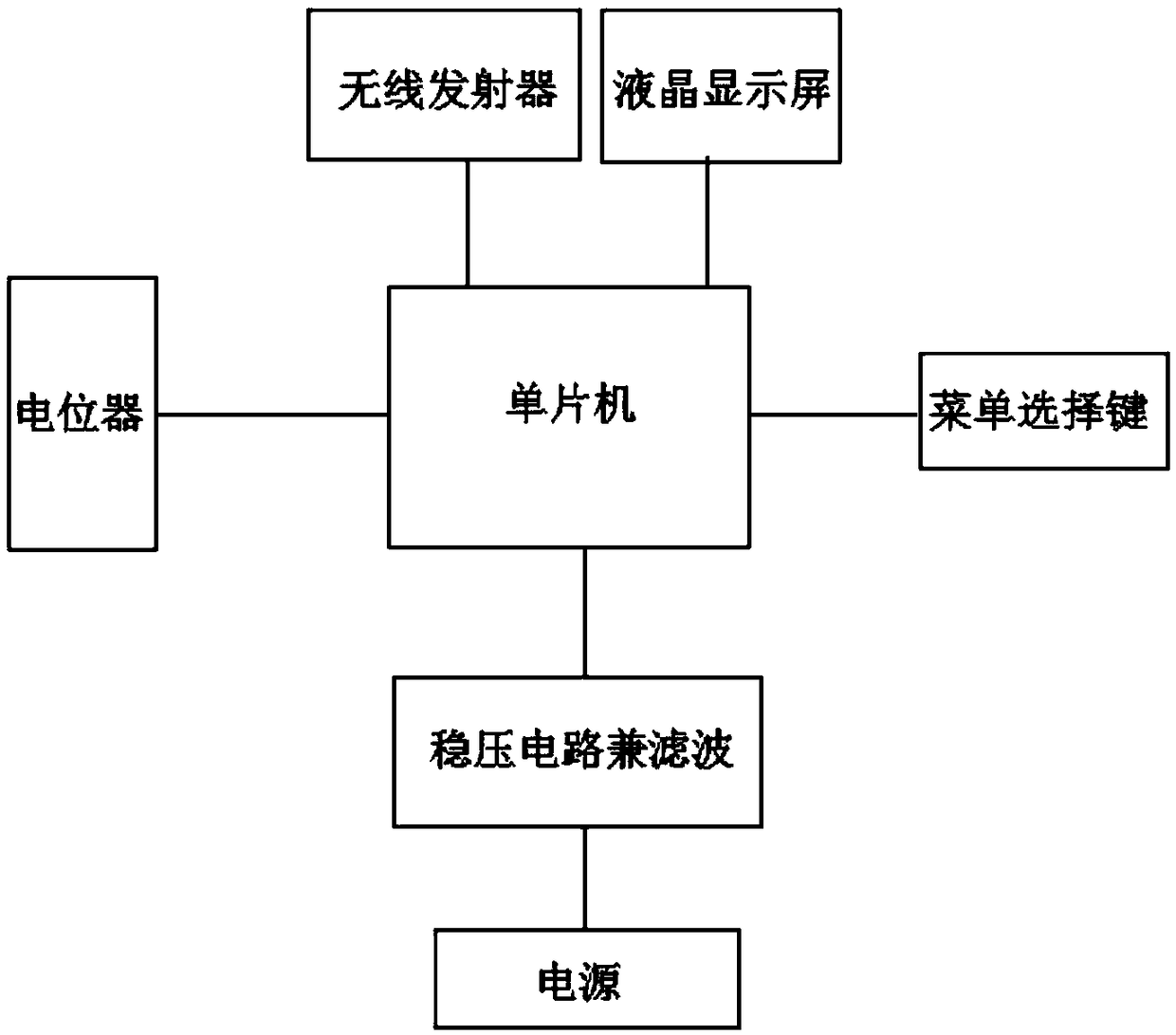
[0053] Further, the main control device is one of the receiving device, the controller or a combination of both;
[0054] The receiving device is a wifi receiver and a 5.8ghz wireless receiver, the wifi receiver is a terminal mobile phone, and a client APP is installed on the terminal mobile phone; the 5.8ghz wireless receiver is composed of a receiver and an encoder, and the Insert the above 5.8ghz wireless receiver into the terminal mobile phone;
[0055] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More