

Hexapod bionic power plant boiler water wall inspection and maintenance climbing wall robot
A wall-climbing robot, bionic technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of weak flexibility, complex structure, poor versatility, etc., achieve flexible movement, strong wall adaptability, and improve service life Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to further elaborate the technical means and effects adopted by the present invention to achieve the intended invention purpose,
[0051] In the following, a hexapod biomimetic power plant boiler water-cooled wall inspection and maintenance wall-climbing robot proposed according to the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments, its specific implementation, features and functions.
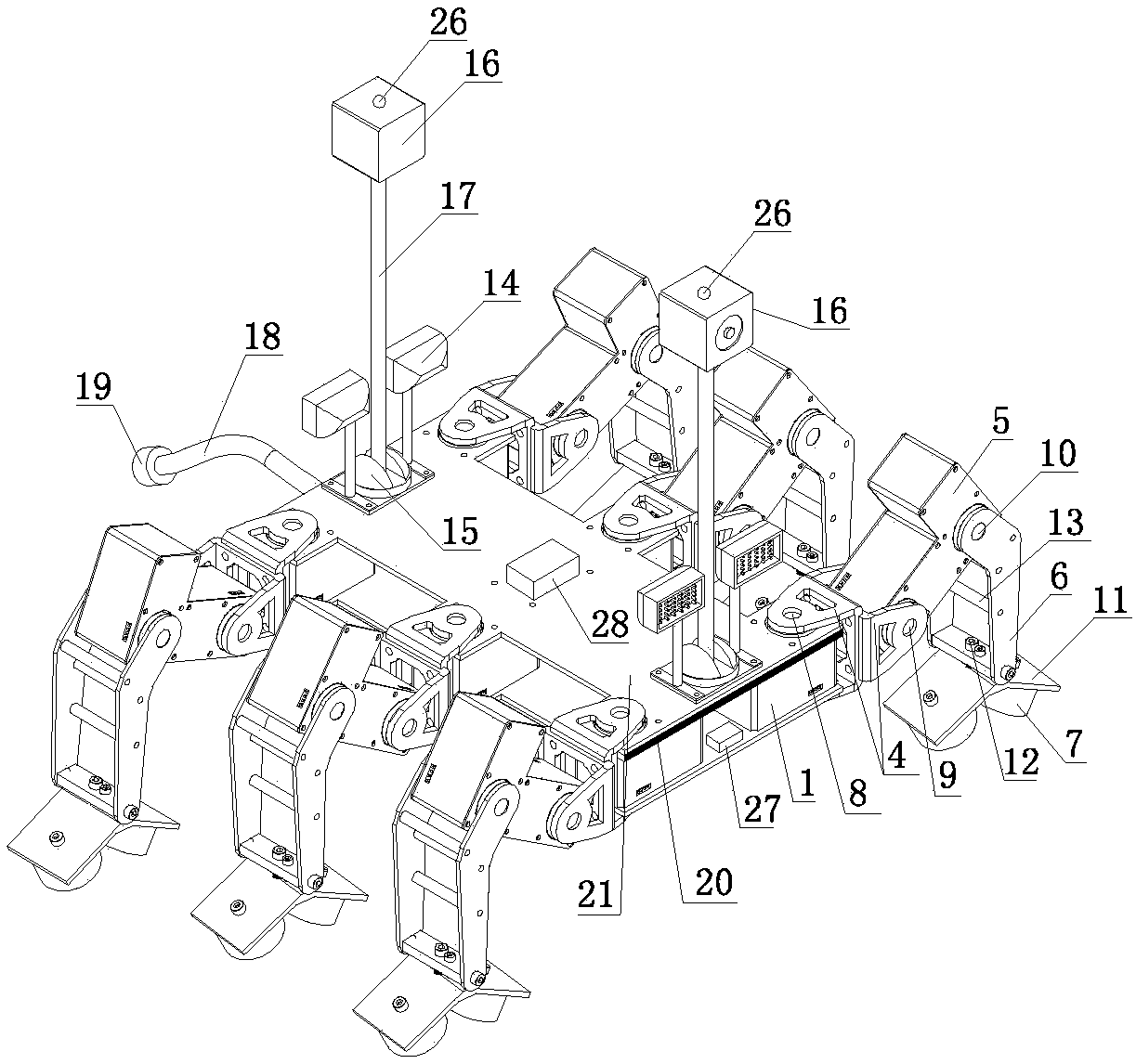
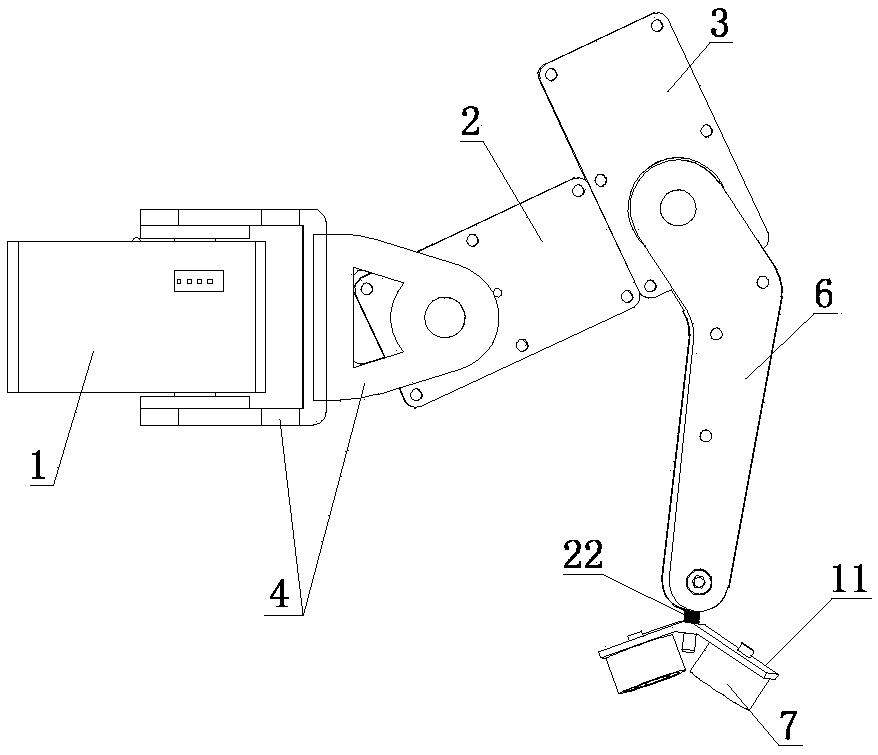
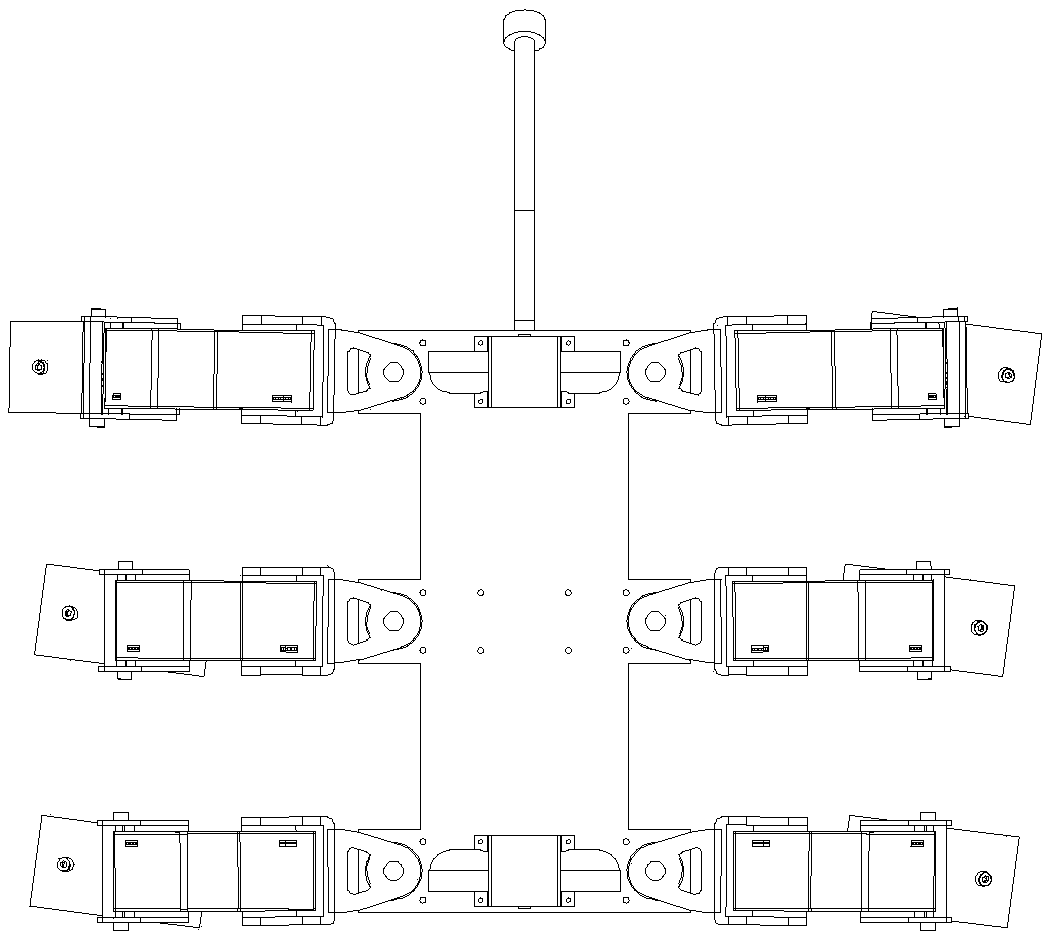
[0052] The invention provides a wall-climbing robot mainly used for inspection and maintenance of boiler water walls in power plants, which includes a robot body and a plurality of mechanical legs arranged on both sides of the robot body. Alternatively, multiple mechanical legs can be arranged symmetrically or asymmetrically on both sides of the robot body.
[0053] by figure 1 An example of an embodiment of the present invention will be described in detail, figure 1 There are 6 mechanical legs in tot...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Adsorption | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More